 网站地图
网站地图



-
为保障输电线路的安全,需要准确探测输电线与走廊地物之间的距离,确保输电线安全距离内无其它地物干扰。机载激光雷达(laser radar, LiDAR)技术能够快速获取线路走廊的数据,利用采集的点云数据进行电力线的提取和建模对电力巡检具有重要意义。巡检人员可通过构建的电力线模型对线路中存在的安全隐患进行及时分析,以确定砍伐范围,清除走廊障碍,避免危害的发生。
目前,电力线的提取和重建方面,许多学者做出一些成果,并提出了各种电力线提取方法[1-5]。MELZER和BRIESE[6]首先对电力线点云数据进行预处理,然后通过迭代的Hough变换实现电力线的提取,但是该方法预处理过程较为复杂,且容易将靠近植被的电力线点错分为非电力线点,也没有实现电力线走廊整体线路的重建。MCLAUGHLIN[7]将点云数据分成若干只包含一根电力线点的椭圆体块,通过计算每个小块的特征值提取电力线点集,然后利用点的聚集方法拟合出同一导线上的点,最后迭代求解出悬链线方程的参量,实现电力线的3维重建。该方法较为新颖,但提取电力线点时产生较多噪声且提取的电力线不连续。针对电力线重建时存在的欠重建和过重建问题,JWA和SOHN应用多层次跨度分析来纠正不完全重建的电力线模型[8],该方法在电力线点提取时存在欠提取的现象,拟合出的电力线模型连续性不佳,且计算复杂。在国内,许多学者也提出了各自的算法[9-17]。但基于激光雷达点云进行电力线提取的研究,普遍存在数据预处理复杂、计算强度大、难以实现自动化的缺陷。另外,目前的算法多适用于高密度点云的提取和重建,对于点云密度不高的电力线存在一定的局限性。
基于以上问题,提出一种电力线提取和重建方法。该方法首先利用格网高差和高程阈值初步提取电力线点,然后利用Hough变换在2维平面分离出单根电力线,在检测出每根电力线的杆塔位置后,利用带有限制条件的平差方程拟合出电力线的最佳参量,最后利用最佳参量实现电力线的3维重建。本文中利用真实电力线走廊的点云数据验证了算法的有效性,并对电力线的提取和拟合效果进行了精度评价。
-
基于机载LiDAR点云的电力线提取和重建主要包括三部分,首先对原始LiDAR点云进行预处理,然后从预处理后的点云中提取出电力线点,即分离出电力线点和非电力线点,包括基于格网高差和高程阈值的电力线初提取和Hough变换单根电力线的分离;最后基于提取的杆塔,利用二次多项式模型对每档导线进行分段拟合得到重建后的电力线模型。具体流程如图 1所示。
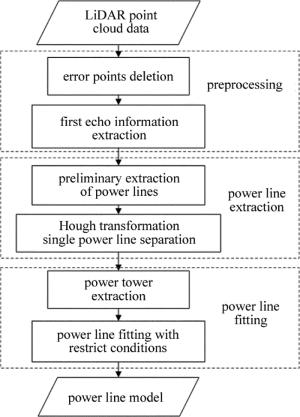
Figure 1. Flow chart of power line extraction and reconstruction
-
LiDAR点云数据获取过程中不可避免会出现高度值与地面目标相差较大的粗差点。为避免粗差点对于后序处理带来影响,在电力线提取之前需要剔除粗差点。粗差点一般可通过高度阈值的设定进行去除。利用机载LiDAR技术获取的点云数据中包括地面、树木、房屋等地物点,这些点会对电力线的提取带来很大的干扰,因此电力线提取需要去除这些地物点。LiDAR点云数据可以记录多次回波信息,电力线点明显高于其它地物且上方无遮挡地物,因此电力线点全部集中在点云的首次回波中。通过对点云提取首次回波信息可以滤除一部分地物点,并且保留全部电力线点。
-
本文中利用格网高差和高程阈值进行电力线的初步提取,该方法首先对离散的点云构建规则格网,格网大小的设置要考虑电力线间的距离,原则是应尽量保证每个格网内至少包含一个点。格网高差h为每个格网内点云的最大高程Hmax和最小高程Hmin之差的绝对值,详见下式:
$ h=\left|H_{\max }-H_{\min }\right| $
(1) 设Pi为预处理后点云中的任意一点,利用基于格网高差的方法对预处理后的点进行判断,若Pi满足限定条件, 则该点属于电力线点,否则为非电力线点。条件判断式详见下式:
$ \left\{\begin{array}{l}{P_{i} \in \varphi(P), \left(h_{\mathrm{th}}<h<\left(H_{\max }+H_{\min }\right) / 2\right)} \\ {P_{i} \notin \varphi(P), (\text { others })}\end{array}\right. $
(2) $ \varphi(P)=\left\{P_{1}, P_{2}, \cdots, P_{n}\right\} $
(3) 式中, φ(P)为初步提取的电力线点的集合,hth为格网高差阈值。通过设置恰当的格网大小和格网高差阈值可以实现电力线点的初步提取。
-
为实现电力线的有效拟合,需要将初提取结果中的电力线点进行单根分离,即判断每个点的归属。由于电力线具有很强的延展性,相邻电力线之间互相平行,可将提取的电力线点投影到x-O-y平面内。在x-O-y平面内对初提取的电力线点利用Hough变换可分离出单根电力线点。Hough变换通过检测参量空间的峰值来确定原始空间的直线,下式为Hough变换空间的直线方程:
$ p=x \cos \theta+y \sin \theta $
(4) 式中,(θ, p)为Hough参量空间中的峰值点,对应于直角坐标中所求的直线。
获得若干条电力线直线方程的参量(θ, p)后,需要判断每个点所归属的电力线。在2维平面上,计算每个点到提取的各条直线的垂直距离,如果该点到某条直线的距离小于一定阈值,则认为该点为这条电力线上的点,阈值一般取电力线间距的1/2。
每条电力线上提取的点数会对拟合精度造成影响,一般电力线上点的个数越多,拟合精度越高。利用Hough变换分离单根电力线点时,不可避免会剔除正确的电力线点。为了提高电力线模型的重建精度,本文中对Hough变换提取的结果进行了优化,最大限度地保留正确的电力线点。优化算法的具体步骤如下:(1)利用Hough变换分离出的各条电力线点,通过最小二乘平差理论在x-O-y坐标空间中拟合出各条电力直线y=kx+g的最佳参量(k, g);(2)根据拟合直线的最佳参量对初提取的电力线点的归属进行判断。计算初步提取的各个电力线点到各电力直线的距离,根据距离阈值对初提取点的归属进行再次判断,若小于阈值则将其归为该条电力线; (3)将Hough变换剔除的正确电力线点重新加入到电力线中,对电力线点进行补充。
-
由于分离后的单根电力线在同一垂直面内,因此无需在3维空间对电力线点进行重建,可通过坐标转换的方法使电力线点的x值或y值相等,然后只需在x-O-z或y-O-z平面内对分离出的电力线点进行拟合即可。这里通过坐标转换使电力线点的y值相同,坐标转换公式见下式:
$ \left[\begin{array}{c}{x^{\prime}} \\ {y^{\prime}} \\ {z^{\prime}}\end{array}\right]=\left[\begin{array}{ccc}{\cos \theta} & {0} & {-\sin \theta} \\ {0} & {1} & {0} \\ {\sin \theta} & {0} & {\cos \theta}\end{array}\right]\left[\begin{array}{l}{x} \\ {y} \\ {z}\end{array}\right] $
(5) 式中,(x, y, z)为转换前的电力线点坐标,(x′, y′, z′)为转换后的电力线点坐标。
该过程本质上是对分离后的电力线点绕z轴做一次坐标旋转,转换后z值不变,y坐标变为相等的数值,得到关于x和z的2维散点图。为提高单根电力线的拟合精度,本文中提出以杆塔点作为约束条件,即拟合的电力线必须经过杆塔点。下文分别论述杆塔点的提取方法和附有限制性条件的电力线拟合。
-
两相邻导线悬挂点间的线路部分称为一档,电力线拟合之前需要检测每档线路的悬挂点,即杆塔的位置。在每档电力线路中杆塔的位置最高,这里通过求局部极值点得到杆塔的坐标点[18-19]。为便于局部极值点的计算,对所有的电力线点进行排序,然后进行极值点的求取。坐标转换后在x-O-z空间对所有电力线点按x值进行升序排列,然后求局部最大值点即可得到杆塔的位置。
-
每根电力线在x-O-z平面内是抛物线,一般可使用多项式方程来表示,见下式:
$ y=a x^{2}+b x+c $
(6) 在两个杆塔之间进行电力线的拟合,杆塔点即为每档电力线的端点。为了使各档电力线拟合成连贯的电力曲线,前一档电力线的终点和后一档电力线的起点需要重合,即保证为同一点,则拟合出的电力线必须通过杆塔点。这里采用带有限制条件的最小二乘法对排序后的电力线点进行拟合,计算出每条电力线的最佳拟合参量(a, b, c),则可以实现每条电力线的3维重建。带有限制条件的间接平差法的基础方程如下式所示:
$ \left\{\begin{array}{l}{\boldsymbol{V}_{n 1}=\boldsymbol{B}_{n n} \hat{\boldsymbol{x}}_{n 1}-\boldsymbol{l}_{n 1}} \\ {\boldsymbol{C}_{s u} \hat{\boldsymbol{x}}_{n 1}+{\boldsymbol{W}_{s 1}}^{\prime}={\bf{0}}_{s 1}}\end{array}\right. $
(7) 式中,Bnn为参量改正数系数矩阵,Csu为参量限制条件方程的系数矩阵,Ws1′为限制条件方程的常数项, ln1为观测值。通过求解可得基础方程的解,$\hat{\boldsymbol{x}}_{n 1}$即为拟合曲线的参量矩阵(a, b, c),见下式:
$ \hat{\boldsymbol{x}}_{n 1}=\left({\boldsymbol{N_{B B}}}^{-1}-{\boldsymbol{N_{B B}}}^{-1} {\boldsymbol{C}_{s u}}^{\mathrm{T}} {\boldsymbol{N_{C C}}}^{-1} \boldsymbol{C}_{s u} {\boldsymbol{N_{B B}}}^{-1}\right) \boldsymbol{W}_{n 1}-\\ \qquad \qquad {\boldsymbol{N_{B B}}}^{-1} {\boldsymbol{C}_{s u}}^{\mathrm{T}} {\boldsymbol{N_{C C}}}^{-1} {\boldsymbol{W}_{s 1}}^{\prime} $
(8) 式中,NBB=BnnTPnnBnn, NCC=CsuNBB-1CsuT, Wn1=BnnTPnnln1,Pnn为观测值的权值。利用求得的模型参量解算出新的电力线点坐标,并在x-O-z空间绘制出电力曲线,即可得到电力线拟合模型。
-
为验证提取算法的有效性,本文中采用±800kV直流特高压输电线走廊的机载LiDAR点云数据进行实验分析。实验中的激光点云数据包含4次回波信息,数据格式为LAS。实验截取的点云数据如图 2a所示,点云个数为1675030,其中包含一组电力线,共3根,2个杆塔,数据范围内的地物类型主要有电力线、植被、河流和山地,点云密度为6.812/m2。将实验点云数据投影到x-O-y平面,并对其进行高程赋色,结果见图 2b。
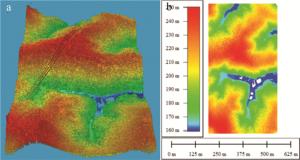
Figure 2. Experimental data
-
实验数据中存在若干粗差点如图 3a所示,利用高程阈值将粗差点剔除,这里高程阈值H满足0 < H < 26300,粗差剔除后结果如图 3b所示,提取首次回波后的结果见图 3c。预处理后利用格网高差和高程阈值将大部分非电力线点滤除,具体参量设置见表 1。点云初步提取结果如图 3d所示,可见利用格网高差和高程可以有效地剔除大部分地物点,实现电力线点的初步提取。

Figure 3. Results of pretreatment and pre-extraction of power line
表 1 Parameters of power line extraction based on grid elevation difference and elevation threshold
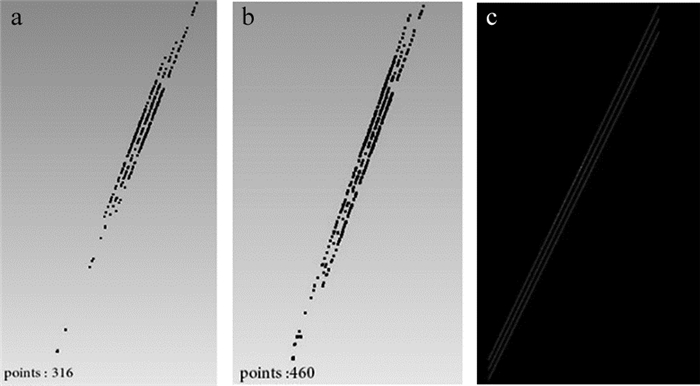
grid size a/m grid elevation difference h/m elevation of point cloud Z/m a=2 11 < h < (Hmax+Hmin)/2 Z>3780, Z>(Hmax+Hmin)/2 将提取的电力线点投影到x-O-y平面,并对其进行Hough变换分离出各条电力线点。初步提取的电力线点投影到x-O-y平面结果如图 4a所示。利用提取的电力线点可拟合出x-O-y坐标平面内电力直线的最佳参量(k, g),3根电力直线的参量见表 2。

Figure 4. Extraction and fitting result of power line in plane of x-O-y
Table 2. The best fitting parameters of three power lines in the plane of x-O-y
power line k g 1 2.724 213.577 2 2.754 233.336 3 2.781 253.064 利用表 2中每条直线的最佳拟合参量,通过本文中提出的改进算法对Hough变换提取的电力线点进行优化,增加电力线上点的个数,改进算法中电力线点提取结果如图 4b所示。可见,改进算法可在一定程度上弥补Hough变换删除的电力线点,改善电力线点的提取效果。各条电力线间距离为1m,则改进算法中点到直线的距离阈值取0.5m。利用改进算法提取的电力线点拟合出的电力直线结果如图 4c所示。
为重建电力线模型,需要确定每档线路的起止杆塔的位置,本文中利用局部高程最大值法来确定。对改进算法归类后的单条电力线点按x值进行升序排列,然后沿电力线方向依次对每个点选取其相邻的前后各20个点,若某点的高程值最大,则可确定该点为电力线的杆塔点。实验数据中共包含3条电力线,两个杆塔,由于第1个杆塔位于实验数据的边缘,因此每条电力线可以拟合出两段电力曲线,包括前段的长电力线和后段的短电力线,共可拟合出6段电力线。将杆塔点和提取的电力线点带入带有限制条件的平差方程,求得每档电力曲线的最佳拟合参量(a,b,c),电力线分段拟合参量见表 3。
Table 3. The best fitting parameters of three power lines
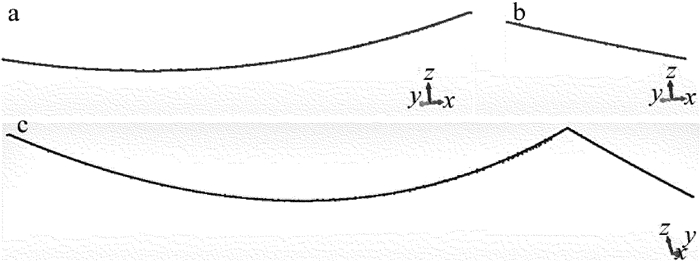
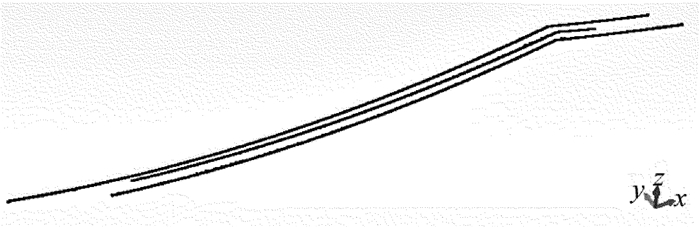
power line long power line of the front section short power line of the back section a b c a b c 1 5.097×10-4 0.113 -74.966 2.085×10-4 -0.277 -40.169 2 4.877×10-4 0.099 -74.641 5.078×10-4 -0.366 -33.615 3 5.015×10-4 0.112 -74.755 2.866×10-4 -0.304 -37.459 根据表 3中的最佳拟合参量将每段电力线进行3维重建,以第3条电力线为例,根据检测出的起始杆塔点和中间杆塔点可拟合出两段电力线,电力线的拟合结果如图 5所示。图 5a为前段长电力线,图 5b为后段短电力线,整条线的拟合结果为图 5c。3条电力线的最终拟合结果如图 6所示。
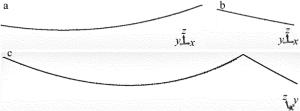
Figure 5. The fitting result of the third power lines
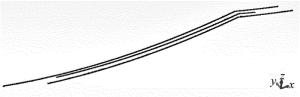
Figure 6. The fitting result of the three power Lines
-
采用提取精度和拟合效果对本文中算法的精度进行评价。电力线的提取精度为正确提取的电力线点数和总电力线点数的比值;拟合效果通过拟合模型的高程值和电力线点的真实高程值的误差均值进行评价。实验数据中共有3根电力线,484个电力线点,利用该算法提取出了424个激光点,点云总的提取率达到87.603%。电力线点的提取精度详见表 4。
Table 4. Extraction accuracy of power line points
power line the section of power line extraction number original number extraction accuracy notes 1 long power line of the front section 142 178 79.775% the total extraction accuracy of power line points =424/484 =87.603% short power line of the back section 18 18 100% total 160 196 81.633% 2 long power line of the front section 90 98 91.837% short power line of the back section 6 7 85.714% total 96 105 91.429% 3 long power line of the front section 153 160 95.625% short power line of the back section 15 23 65.217% total 168 183 91.803% 从表 4的统计结果可知,2号电力线和3号电力线总的提取精度较高,分别为91.429%和91.803%,几乎可以将电力线上的点全部提取出来。1号电力线后段短电力线上的点也可以全部提取出来,前段长电力线由于设置的阈值的影响,部分电力线点被滤除。总体上来说,本文中提出的提取算法可以很好地提取出电力线上的点云,同时可以分离出单根电力线点,并可满足电力线的拟合要求,实现了电力线的自动高效地提取和重建。电力线模型的拟合精度可通过拟合平面x-O-z内的误差均值进行评价。误差均值zmean的公式如下式所示:
$ z_{\text { mean }}=\frac{1}{n} \sum\limits_{i=1}^{n}\left(z_{i}-z^{\prime}\right) $
(9) 式中,zi为电力线点高程,z′为由拟合模型求得的高程值。6段电力线的拟合模型和误差均值见表 5,表中z表示点云的高程。
Table 5. The fitting model and error means of three power curves
power line long power line of the front section short power line of the back section fitting model mean error /m fitting model mean error/m 1 z=5.097×10-4x2+0.113x-74.966 -0.021 z=2.085×10-4x2-0.277x-40.169 0.006 2 z=4.877×10-4x2+0.099x-74.641 0.076 z=5.078×10-4x2-0.366x-33.6 -0.001 3 z=5.015×10-4x2+0.112x-74.755 -0.030 z=2.866×10-4x2-0.304x-37.459 0.038 -
针对机载LiDAR点云数据中电力线的特点,本文中提出了基于格网高差和高程阈值的电力线提取算法,优化了Hough变换分离单根电力线的方法,并对电力线的拟合方法进行了改进,最后利用带有限制条件的多项式方程实现了电力线的重建。本文中算法仅需要设置几个简单的阈值即可实现电力线的提取,避免了大量计算和操作,提高了效率。为验证算法的有效性,利用真实数据对算法进行了实验分析和精度评价,电力线的提取精度可满足重建要求,单根电力线的拟合效果也较好,证明了该算法对电力线点云提取的有效性,电力线的重建达到了较好效果。
机载LiDAR点云中电力线的提取和重建研究
Power line extraction and reconstruction from airborne LiDAR point cloud
-
摘要: 为了实现输电线走廊的有效监管,采用了一种基于机载激光雷达(LiDAR)点云的电力线提取和重建的方法。首先利用点云的回波信息滤除大部分地物点,保留电力线的全部信息, 然后基于格网高差和高程阈值剔除大部分非电力线点云,实现电力线的初提取。针对初步提取出的电力线点云,通过Hough变换分离出单根输电线点。为提高电力线点的提取精度,对Hough变换提取的结果进行了改进,利用局部极值点检测的方法确定杆塔的位置,最后通过带有限制条件的多项式模型对每档电力线进行分段拟合,实现电力线模型的3维重建。结果表明,利用该算法提取出了424个电力线点,总的提取精度达到87.603%,拟合出的电力线模型效果较好。该算法可以自动、精确地实现LiDAR点云数据中电力线的提取和重建,对输电线走廊巡检具有很好的实用价值。Abstract: In order to achieve effective supervision of transmission line corridors, a method of power line extraction and reconstruction was proposed based on airborne laser radar(LiDAR) point cloud. Firstly, echo information of point clouds was used to filter out the most of ground objects and keep all information about power line. And then, most non-power line point clouds were removed based on grid height elevation and elevation threshold. The initial extraction of power line was realized. For the preliminary extracted point cloud of power line, a single transmission line point was separated by Hough transform. In order to improve the accuracy of power line point extraction, the extraction result of Hough transform was improved. Then the location of the tower was determined by means of local extreme point detection. Finally, a polynomial model with constraints was used to segment each power line and realize 3-D reconstruction of power line model. The results show that, 424 power line points are extracted by this algorithm and the total extraction accuracy is 87.603%. The fitted power line model has a good effect. The algorithm can automatically and accurately extract and reconstruct power lines from LiDAR point cloud data. It has a good practical value for the inspection of transmission line corridors.
-
Key words:
- laser technique /
- power line model /
- grid elevation difference /
- Hough transformation
-
Figure 2. Experimental data
a—±800kV direct current ultra high voltage power line point cloud b—elevation color map of point cloud
Figure 3. Results of pretreatment and pre-extraction of power line
a—original point cloud b—point cloud after deleting error points c—point cloud of the first echo information d—preliminary extraction result of power line
Figure 4. Extraction and fitting result of power line in plane of x-O-y
a—the extracted power line points by Hough transformation b—the extracted power line points by improved method c—the fitting result of power line
Figure 5. The fitting result of the third power lines
a—the fitting result of power line in the front section b—the fitting result of the power line in the back section c—the fitting result of power line
表 1 Parameters of power line extraction based on grid elevation difference and elevation threshold
grid size a/m grid elevation difference h/m elevation of point cloud Z/m a=2 11 < h < (Hmax+Hmin)/2 Z>3780, Z>(Hmax+Hmin)/2  下载: 导出CSV
下载: 导出CSV
Table 2. The best fitting parameters of three power lines in the plane of x-O-y
power line k g 1 2.724 213.577 2 2.754 233.336 3 2.781 253.064
下载: 导出CSV
Table 3. The best fitting parameters of three power lines
power line long power line of the front section short power line of the back section a b c a b c 1 5.097×10-4 0.113 -74.966 2.085×10-4 -0.277 -40.169 2 4.877×10-4 0.099 -74.641 5.078×10-4 -0.366 -33.615 3 5.015×10-4 0.112 -74.755 2.866×10-4 -0.304 -37.459
下载: 导出CSV
Table 4. Extraction accuracy of power line points
power line the section of power line extraction number original number extraction accuracy notes 1 long power line of the front section 142 178 79.775% the total extraction accuracy of power line points =424/484 =87.603% short power line of the back section 18 18 100% total 160 196 81.633% 2 long power line of the front section 90 98 91.837% short power line of the back section 6 7 85.714% total 96 105 91.429% 3 long power line of the front section 153 160 95.625% short power line of the back section 15 23 65.217% total 168 183 91.803%
下载: 导出CSV
Table 5. The fitting model and error means of three power curves
power line long power line of the front section short power line of the back section fitting model mean error /m fitting model mean error/m 1 z=5.097×10-4x2+0.113x-74.966 -0.021 z=2.085×10-4x2-0.277x-40.169 0.006 2 z=4.877×10-4x2+0.099x-74.641 0.076 z=5.078×10-4x2-0.366x-33.6 -0.001 3 z=5.015×10-4x2+0.112x-74.755 -0.030 z=2.866×10-4x2-0.304x-37.459 0.038
下载: 导出CSV
-
[1] LIANG J, ZHANG J, DENG K, et al. A New power-line extraction method based on airborne LiDAR point cloud data[C]//International Symposium on Image and Data Fusion. New York, USA: IEEE, 2011: 1-4. [2] WANG P H, X I X H, WANG Ch, et al. Study on power line fast extraction based on airborne LiDAR data[J]. Science of Surveying & Mapping, 2017, 42(2):154-158. [3] ZHU L, HYYPPÄ J. Fully-automated power line extraction from airborne laser scanning point clouds in forest areas[J]. Remote Sensing, 2014, 6(11):11267-11282. doi: 10.3390/rs61111267 [4] ZHENG Ch Ch, LIANG Y L, et al. Research on the method of power line extraction in airborne laser radar data[J]. Survey World, 2018(3):28-34(in Chinese). [5] ZHOU R Q, ZHAI R Ch, JIANG W Sh, et al. Automatic extraction and reconstruction of bundle conductors from airborne LiDAR point clouds[J]. Science of Surveying and Mapping, 2018, 43(6):124-130(in Chinese). [6] MELZER T, BRIESE C. Extraction and modeling of power lines from ALS point clouds[EB/OL].(2004-06-17)[2008-08-07].http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.84.3645&rep=rep1&type=pdf. [7] McLAUGHLIN R A. Extracting transmission lines from airborne Li- DAR data[J].IEEE Geoscience and Remote Sensing Letters, 2006, 3(2): 222-226. [8] JWA Y, SOHN G. A multi-level span analysis for improving 3-D power-line reconstruction performance using airborne laser scanning data[J/OL]. (2010-09-01)[2018-09-20]. http://www.isprs.org/proceedings/xxxviii/part3/a/pdf/97XXXVIII-part3A.pdf. [9] LI J, ZHANG J X, LIU Zh J. On extracting power-line from airborne LiDAR point cloud data[J]. Bulletin of Surveying and Mapping, 2012(7):17-20(in Chinese). [10] YOU A Q, HAN X Y, LI Sh P, et al. Transmission lines fitting and towers positioning in LiDAR point cloud[J]. Computer Science, 2013, 40(4):298-300(in Chinese). [11] HAN W J, YANG F, PENG J G. Power line extraction and modeling based on LiDAR point cloud[J]. Yangtze River, 2012, 43(8):18-21(in Chinese). [12] LIU Zh J, LIANG J, ZHANG J X. Power lines extraction from airborne LiDAR data using spatial domain segmentation[J]. Journal of Remote Sensing, 2014, 18(1):61-76(in Chinese). [13] ZHANG J X, DUAN M Y, LIN X G, et al. Comparison and analysis of models for 3-D power line reconstruction using LiDAR point cloud[J]. Geomatics and Information Science of Wuhan University, 2017, 42(11):1565-1572(in Chinese). [14] CHEN Ch, PENG X Y, SONG Sh, et al. Safety distance diagnosis of large scale transmission line corridor inspection based on LiDAR point cloud collected with UAV[J]. Power System Technology, 2017, 41(8):2723-2730(in Chinese). [15] LAI X D, DAI D Ch, ZHENG M, et al. Powerline three-dimensional reconstruction for LiDAR point cloud data[J]. Journal of Remote Sensing, 2014, 18(6):1223-1229(in Chinese). [16] YE L, LIU Q, HU Q W. Research of power line fitting and extraction techniques based on LiDAR point cloud data[J]. Geomatics & Spatial Information Technology, 2010, 33(5):30-34(in Chinese). [17] ZHOU X W. Applications of LiDAR technology in power transmi-ssion line projects[J].Science of Surveying and Mapping, 2010, 35(5):83-85(in Chinese). [18] MU Ch. Study on power lines corridor features extraction method from different remote sensing data[D].Wuhan: Wuhan University, 2010: 1-93(in Chinese). [19] YU J, MU Ch, FENG Y M, et al. Power lines extraction techniques from airborne LiDAR data[J]. Geomatics and Information Science of Wuhan University, 2011, 36(11):1275-1279(in Chinese). -

 点击查看大图
点击查看大图

计量
- 文章访问数: 5772
- HTML全文浏览量: 3704
- PDF下载量: 28
- 被引次数: 0
