 网站地图
网站地图


-
随着军工行业的不断发展,各种特型热电偶层出不穷,其响应速度越来越迅速,人们对热电偶时间常数的测试提出了更高的要求[1]。传统的热电偶时间常数测试系统是将热电偶由室温快速投入到水(油、火)中,使其受到阶跃温度的激励从而获得其响应曲线,测量热电偶响应曲线从室温变化到平稳温度的时间间隔的63.2%作为热电偶的时间常数[2-8]。但是传统方法的上升温度范围有限,且受到其实验操作中机械投入速度的影响,对热电偶时间常数测试有着较大的影响。激光由于其功率大等优点,目前已有相关人士用激光器作为加热装置,使用调Q技术获得高能量的激光脉冲,激光脉冲通过特定的角度照射到热电偶的测温端表面,热电偶测温端表面吸收激光能量产生温度变化,使得热电偶输出电压信号,然后再使用高速红外测温仪测量热电偶热节点处的辐射温度值,并以此信号作为动态校准的输入信号,利用这两路信号进行数学建模得到热电偶的数学模型,通过输入理想阶跃信号,得到热电偶数学模型理想输出响应曲线,再从本曲线上测量得出热电偶时间常数[9-13]。此方法较为繁杂,需要对热电偶进行复杂的数学建模。
本文中提出使用可调功率式连续激光器,通过加入负反馈环节,瞬间实时改变激光器功率,得到以激光器为核心的阶跃温度源,从而构建热电偶时间常数测试系统。但是常规的比例-积分-微分(proportion-integration-differentiation, PID)控制算法使得激光加热恒温区温度平稳时间较长,热电偶时间常数测试结果有较大的系统误差。根据热电偶常数测试系统的需要,本文中采用参量自动随系统变化而变化的模糊PID算法。
-
该激光控温系统硬件控制电路由STM32控制器、红外辐射探头放大电路、热电偶放大电路、模数转换器(analog-to-digital converter, ADC)采集电路、数模转换器(digital-to-analog converter, DAC)电路、激光器驱动电路等构成。整体的硬件系统见图 1。

Figure 1. Block diagram of laser temperature control system
图 1中将计算得到的执行量通过数模转换成模拟电压输送到激光器驱动电源(本部件通过输入不同的模拟电压可以输出不同的电流),激光器驱动电源主要给激光器提供输入电流,激光器通过输入不同的电流实现调节激光器激光功率的功能。红外辐射探头可以检测热电偶表面的辐射,因为其响应速度远远优于热电偶,所以认定红外辐射探头所测得温度值为热电偶表面温度真值。通过红外辐射温度信号以负反馈的方式接入控制激光器驱动电源输入电压,实现激光器激光功率的精确控制。
-
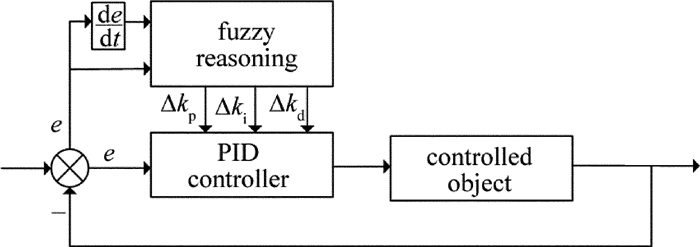
算法选择传统PID算法与智能模糊控制算法相结合的模糊PID算法。模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的控制技术,它具有闭环结构,可通过反馈来实现控制效果,并且它不依赖受控目标的数学模型,鲁棒性和自适应性好,可对具有复杂结构的对象实现有效控制[14-15]。模糊PID控制器设计过程主要有4步:(1)通过隶属函数曲线对输入量进行模糊化得到隶属度;(2)选择出隶属度最大的一项;(3)通过模糊控制规则表进行模糊推理;(4)通过隶属函数反模糊化。模糊PID控制器根据PID控制规律,选用两输入、三输出的结构,即选用热电偶表面温度值与设定温度值的误差e及误差变化率ec作为控制器输入,通过控制器输出得到PID的参量的增量变化,进而实现PID参量的自适应调节。模糊PID控制器结构框图如图 2所示。
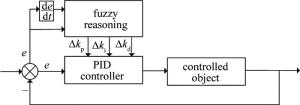
Figure 2. Block diagram of fuzzy PID controller
模糊PID参量自整定如下所示。
(1) 参量Δkp的整定原则。当响应在上升过程时,Δkp增大可以适当地增大系统的响应速度,同时可以一定程度上减小系统的稳态误差。当系统超调过大时,适当减小Δkp,这样可以提高系统稳定性。把Δkp调得过小会导致系统精度变差,减慢响应速度,最终导致调节时间变长。因此,在系统误差较大时,增大Δkp的值,加快系统的响应速度;当接近系统稳态域时,减小Δkp的值,减小系统的超调;当系统在稳态域时,Δkp选取合适的值。
(2) 参量Δki的整定原则。控制系统的积分环节主要影响着系统的稳态误差。当稳态误差较大时,适当地增大Δki的值可以消除稳态误差;Δki值越大,稳态误差的消除越快,过大则会导致响应初期饱和,引起较大的超调量。但是当Δki的值过小时,会导致系统最终的稳态误差难以消除,影响系统最终的控制精度。因此当系统大误差时,令Δki=0;中误差时,则选取较小的Δki;系统进入稳态时,可以适当地增大系统Δki的值。这样通过积分系统的不断改变,既兼顾到稳态时系统对积分系数的要求,又避免积分饱和现象的产生。
(3) 参量Δkd的整定原则。系统微分环节参量Δkd的调节用来改善系统动态特性。同经典PID控制器的微分环节类似,Δkd的作用主要是对系统误差进行提前预报,起到一个阻尼作用,防止系统误差的变化。但是Δkd不宜过大,否则会导致系统制动的过分提前,从而使调节时间变长,降低系统的抗干扰能力。当系统大误差时,使Δkd=0,即消除系统阻尼作用,使得系统响应速度加快;当系统接近稳态域时,增大Δkd的值,可以减少超调;当系统进入稳态域,选取适当的Δkd值,使得系统不会在设定值上下来回振荡。
-
将系统误差e和误差变化率ec的范围定义为模糊集的域,输入变量和输出变量的模糊子集设置为7个级别{NB(negative big), NM(negative medium), NS(negative small), ZO(zero), PB(positive big), PM(positive medium), PS(positive small)}, 即{负大,负中,负小,零,正小,正中,正大}。在热电偶时间常数测试系统中,模糊控制器输入量和输出量的模糊论域的选择为:e∈[-3, 3];ec∈[-3, 3];Δkp∈[-3, 3];Δki∈[-1, 1];Δkd∈[-1, 1]。
根据系统和实际情况,设该系统的e和ec为:e, ec={NB, NM, NS, ZE, PS, PM, PB}; Δkp, Δki, Δkd={NB, NM, NS, ZE, PS, PM, PB}。
根据上面各个参量的模糊论域,设定以上参量的各个量化等级如下所示:e, ec={-3, -2, -1, 0, 1, 2, 3};Δkp={-3, -2, -1, 0, 1, 2, 3}。
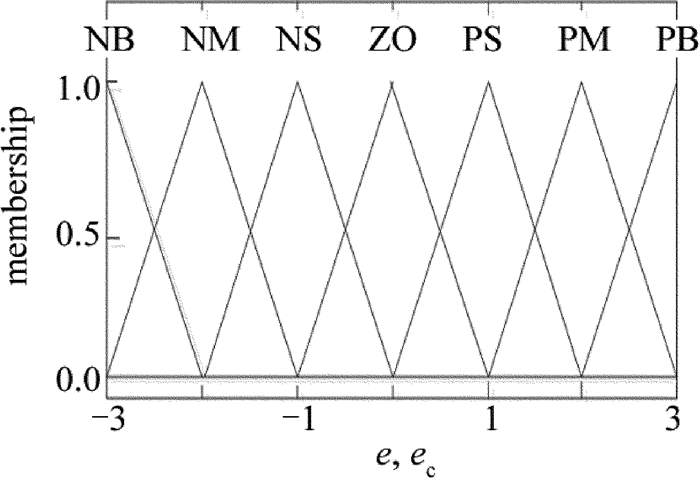
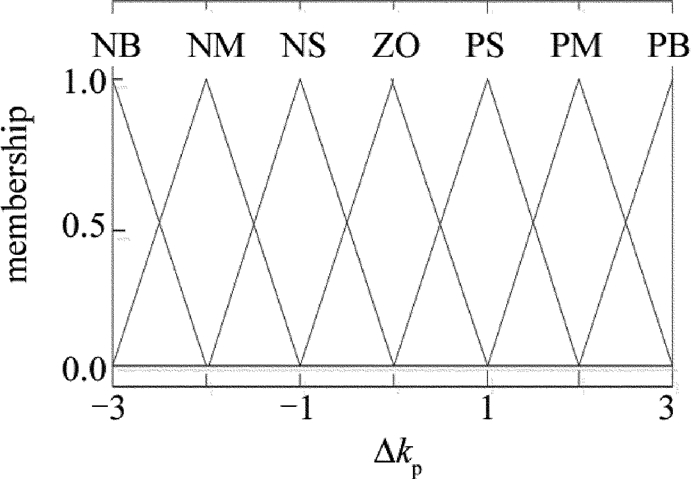
根据以上模糊论域和各个参量的量化等级,可以得到系统输入量与输出量的隶属函数曲线。图 3表示e和ec的隶属函数曲线。图 4表示Δkp隶属函数曲线。图 5则表示Δki, Δkd的隶属函数曲线。
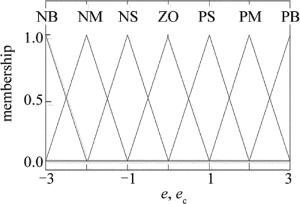
Figure 3. Membership function curve of system input quantities e and ec
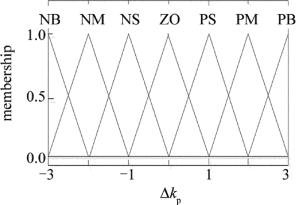
Figure 4. Membership function curve of system output variables Δkp
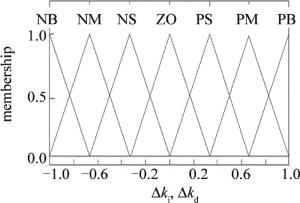
Figure 5. Membership function curve of system output variables Δki, Δkd
针对Δkp, Δki, Δkd 3个参量的整定原则和各自的特性,获得了如下3个参量的模糊控制规则表,模糊控制规则表如表 1、表 2和表 3所示。
Table 1. Fuzzy control rule table of Δkp
ec NB NM NS ZO PS PM PB e NB PB PB PM PM PS ZO ZO NM PB PB PM PS PS ZO NS NS PM PM PM PS ZO NS NS ZO PM PM PS ZO NS NM NM PS PS PS ZO NS NS NM NM PM PS ZO NS NM NM NM NB PB ZO ZO NM NM NM NB NB Table 2. Fuzzy control rule table of Δki
ec NB NM NS ZO PS PM PB e NB NB NB NM NM NS ZO ZO NM NB NB NM NS NS ZO ZO NS NB NM NS NS ZO PS PS ZO NM NM NS ZO PS PM PM PS NM NS ZO PS PS PM PB PM ZO ZO PS PS PM PB PB PB ZO ZO PS PM PM PB PB Table 3. Fuzzy control rule table of Δkd
ec NB NM NS ZO PS PM PB e NB PS NS NB NB NB NM PS NM PS NS NB NM NM NS ZO NS ZO NS NM NM NS NS ZO ZO ZO NS NS NS NS NS ZO PS ZO ZO ZO ZO ZO ZO ZO PM PB NS PS PS PS PS PB PB PB PM PM PM PS PS PB 模糊控制器中的参量调整后如下:
$ k_{\mathrm{p}}=k_{\mathrm{p}}^{\prime}+\Delta k_{\mathrm{p}} $
(1) $ k_{\mathrm{i}}=k_{\mathrm{i}}^{\prime}+\Delta k_{\mathrm{i}} $
(2) $ k_{\mathrm{d}}=k_{\mathrm{d}}^{\prime}+\Delta k_{\mathrm{d}} $
(3) 式中,kp为比例系数,ki为积分系数,kd为微分系数,kp′, ki′和kd′是系统的初始控制器参量的值,由经验法中的试凑法调节得到;而Δkp, Δki和Δkd是模糊控制器经过一系列推理得到的输出值,即PID参量的校正量。
把(1)式~(3)式求得的kp, ki和kd 3个参量代入数字PID控制表达式(4)式中,这就是控制器的输出量,经过反馈控制器计算后,使其输出相对应的脉冲宽度调制(pulse-width modulation, PWM)波控制热电偶时间常数测试系统的驱动电源模块,进而改变平均功率,这样就实现了系统的温度控制,使其在热电偶表面形成了阶跃的温度场。
$ \begin{array}{c} u(k) = {k_{\rm{p}}}{\rm{e}}(k) + {k_{\rm{i}}}\sum\limits_{j = 0}^k e (j) + \\ {k_{\rm{d}}}[e(k) - e(k - 1)] \end{array} $
(4) 式中,u(k)为PID控制器的输出,e(k)为数字PID控制器的输入,是第k个采样时刻的偏差值。
-
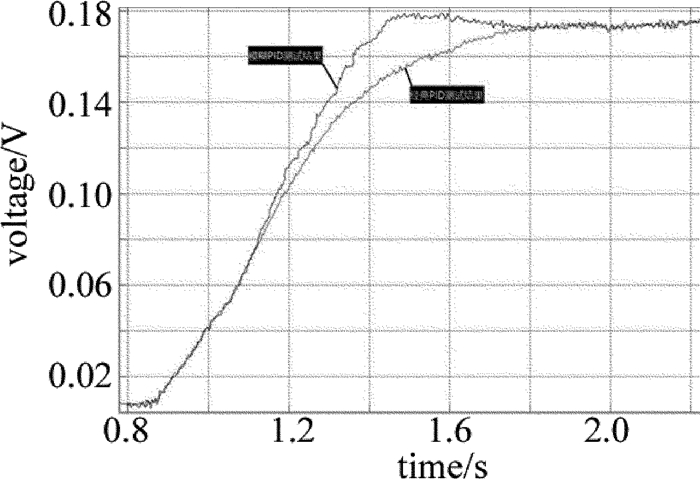
在温度20℃、湿度59%、标准大气压的环境下,使用本文中设计的时间常数测试系统对KQXL-18U-6型热电偶进行测试。使用数据采集卡采集热电偶调理电路的电压输出,得到受激光阶跃激励后热电偶的响应曲线,与之前PID控制测得的时间常数曲线做对比,可得如图 6所示的实验结果, 实现了测试目标。
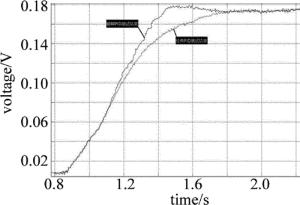
Figure 6. Comparison chart of control effect
对图 6中两组曲线进行对比分析,在Topview2000信号采集软件中经过分析可以直接得到两种不同控制方法下上升时间和超调量以及该热电偶的时间常数;在经典PID控制和模糊PID控制作用下,该型热电偶时间常数测试结果如表 4所示。
Table 4. Test results of K-type thermocouple time constant
control algorithm rise rime/ms overshoot/% time constant/ms classic PID 907.8 0 446.9 fuzzy PID 570.4 1.7 421.1 通过实验结果对比,容易发现:经典PID控制下K型热电偶时间常数测试结果为446.9ms,模糊PID控制下K型热电偶时间常数测试结果为421.1ms; 实际控制中,模糊PID控制器进入稳态的时间相对经典PID控制,缩短了许多,其阶跃温度源的上升时间更短,所以使得测试结果中热电偶对于准阶跃激励的响应时间更短;可见模糊PID控制器在控制稳定性上比传统PID控制效果要好,同样是控制目标,采用模糊PID控制器来实现,不仅能够减少调节时间、提高控制稳定性,还能够减少能量损耗,相比于传统PID控制器各项其它性能也较优。使用经典PID控制器测试K型热电偶时间常数测试系统超调量为0,使用模糊控制器测试K型热电偶时间常数的超调量为1.7%;由实验结果发现,经典PID控制由于参量选择相对合理,使得其超调量近乎为0,模糊PID控制器由于其Δkp, Δkp较大,使得上升时间变得更快,但是也同时使得其产生了一定的超调量,超调量在合理范围内,可忽略不计。
模糊PID控制器因为不依赖于被控对象的精确数学模型以及不断在线对参量进行整定,使得其抗干扰性方面要优于经典PID控制器。由分析可知,模糊控制器较经典PID控制器在控制激光器出光和对热电偶加热过程中有着更为精准的控制,模糊控制器控制效果更佳,更适宜于复杂系统的控制。
-
介绍了一种利用高功率半导体激光器作为阶跃温度的激励装置获取热电偶时间常数的方法,结合经典控制算法,从模糊算法入手,构建了热电偶时间常数测试系统,对模糊控制下的时间常数曲线进行分析,并与经典PID控制下的实验结果对比,测得某K型外露型热电偶在标况下阶跃温度为700℃时的时间常数,结果表明:模糊PID控制系统动态性能良好,具有更快的响应速度;上升时间与所测热电偶时间常数较小,对经典PID控制有明显的改善作用,能取得较好的控制效果。模糊控制在激光作为热源的阶跃温度产生装置中,对快速、高温热电偶时间常数的测试提供了有效的阶跃温升源,提高了时间常数测试准确度,减小了测量误差,具有重大意义。
基于快速激光恒温区的热电偶时间常数的测量
Measurement method of thermocouple time constant based on fast laser constant temperature zone
-
摘要: 为了解决热电偶时间常数测试中阶跃温度问题, 采用模糊控制算法反馈控制激光器的输出功率, 设计了一种新的参量自适应模糊比例-积分-微分控制算法的闭环控制系统, 并进行了理论分析和实验验证, 测得某K型热电偶的时间常数为421.1ms。结果表明, 该算法能有效缩短平衡时间和增强控温系统的抗干扰能力。该结果对热电偶的校准研究是有帮助的, 具有一定的工程参考及应用价值。Abstract: In order to solve the step temperature problem during test of thermocouple time constant, fuzzy control algorithm was used to feedback control the laser output power, a new parameter adaptive fuzzy proportion-integration-differentiation control algorithm was implemented and the hardware of closed-loop control system was analyzed. The experimental results show that, the time constant data of K-type thermocouple is 421.1ms. The algorithm can effectively shorten the balance time and enhance the anti-interference ability of the temperature control system. This research is helpful for the calibration research of thermocouples, and has certain engineering reference and application value.
-
Table 1. Fuzzy control rule table of Δkp
ec NB NM NS ZO PS PM PB e NB PB PB PM PM PS ZO ZO NM PB PB PM PS PS ZO NS NS PM PM PM PS ZO NS NS ZO PM PM PS ZO NS NM NM PS PS PS ZO NS NS NM NM PM PS ZO NS NM NM NM NB PB ZO ZO NM NM NM NB NB  下载: 导出CSV
下载: 导出CSV
Table 2. Fuzzy control rule table of Δki
ec NB NM NS ZO PS PM PB e NB NB NB NM NM NS ZO ZO NM NB NB NM NS NS ZO ZO NS NB NM NS NS ZO PS PS ZO NM NM NS ZO PS PM PM PS NM NS ZO PS PS PM PB PM ZO ZO PS PS PM PB PB PB ZO ZO PS PM PM PB PB
下载: 导出CSV
Table 3. Fuzzy control rule table of Δkd
ec NB NM NS ZO PS PM PB e NB PS NS NB NB NB NM PS NM PS NS NB NM NM NS ZO NS ZO NS NM NM NS NS ZO ZO ZO NS NS NS NS NS ZO PS ZO ZO ZO ZO ZO ZO ZO PM PB NS PS PS PS PS PB PB PB PM PM PM PS PS PB
下载: 导出CSV
Table 4. Test results of K-type thermocouple time constant
control algorithm rise rime/ms overshoot/% time constant/ms classic PID 907.8 0 446.9 fuzzy PID 570.4 1.7 421.1
下载: 导出CSV
-
[1] DUAN X G, HAO X J. Study on step temperature rise signal in thermocouple time constant test[J].Laser Technology, 2018, 42(2):192-195(in Chinese). [2] JIA Ch, CAI J, XIONG Zh H. A temperature sensor and dynamic calibration method[J].China Science and Technology Information, 2017(23):56-57(in Chinese). [3] LI X D, PEI H D, ZHAO X M. Application of high temperature flame method in thermocouple's dynamic characteristics analysis[J]. China Sciencepaper, 2018, 13(14):1674-1678(in Chinese). [4] WU F, YANG X Y, WANG L. Study on measuring time constants of surface temperature sensors[J].Measurement Technology, 2014, 34(4):60-62(in Chinese). [5] SUN H J, LI W J, LI J Q, et al. A thermocouple time constant test system[J].Journal of China University of Metrology, 2017, 28(2):146-152(in Chinese). [6] ZHAO X M, WANG W L, LI Y F, et al. Temperature sensor's dynamic characteristic compensation during the test of flame temperature flied[J].Chinese Journal of Sensors and Actuators, 2017, 30(5): 735-741(in Chinese). [7] ZHANG H Q, DAI R P, LU H Z, et al. Research on the Lagrange-model of MEMS microwave power sensor[J]. Chinese Journal of Scientific Instrument, 2018, 39(8):110-117(in Chinese). [8] DING J, TANG X, YANG S J, et al. Dynamic characteristics calibration of temperature sensor based on miniaturized deflagrating gene-ration equipment[J]. Chinese Journal of Sensors and Actuators, 2018, 31(2):195-201(in Chinese). [9] HAO X J, ZHOU H Ch, LI K J, et al. Application of CO2 laser to response time measurement of surface[J].Chinese Journal of Scientific Instrument, 2007, 28(6):1040-1044 (in Chinese). [10] CUI Y X, SHENG X X, LIU Y, et al. Development of thin-film thermocouple temperature screw sensor[J]. Instrument Technique and Sensor, 2015(2):1-4(in Chinese). [11] WANG X N, YU F Zh, YANG S J, et al. Study of TFTC dynamic character based on lumped capacitance method[J]. Chinese Journal of Sensors and Actuators, 2014, 27(12):1627-1631(in Chinese). [12] WU P, LIN T. Research on identification modeling of sheathed thermocouple sensor based on hybrid QGA-SVM[J]. Chinese Journal of Scientific Instrument, 2014, 35(2):343-349(in Chinese). [13] DING J, CHEN R R, WANG J Y, et al. Static characteristics calibration of Pt/Au thin-film thermocouple by means of laser heating and temperature extrapolation method[J]. Sensors & Actuators, 2018, A279:178-190. [14] SAHOO B P, PANDA S. Improved grey wolf optimization technique for fuzzy aided PID controller design for power system frequency control[J]. Sustainable Energy, Grids and Networks, 2018(9):6. [15] RABINDRA K S, SIDHARTHA P, PRATAP C P. Design and ana-lysis of hybrid firefly algorithm-pattern search based fuzzy PID controller for LFC of multi area power systems[J]. International Journal of Electrical Power and Energy Systems, 2015, 69:200-212. doi: 10.1016/j.ijepes.2015.01.019 -

 点击查看大图
点击查看大图

图(6) / 表(4)
计量
- 文章访问数: 7308
- HTML全文浏览量: 5672
- PDF下载量: 22
- 被引次数: 0
