 网站地图
网站地图


-
一般说来,米尺、游标卡尺、螺旋测微计是长度测量的首选,但是,由于这些仪器的测量精度有限,因此,在物体位移量很小的情况下,很难测出其真实移动量,特别是这些仪器必须接触待测体,无法实现动态测量,由此引发了一系列微小位移的测量技术的出现,大致分为电测法和光测法两大类[1-2]。电测法包括电容式测量、电感式测量、霍尔元件测量、电阻应变片测量等[1]。光测法包括光杠杆法、迈克尔逊干涉法、双光栅法、莫尔条纹法等。其中,迈克尔逊干涉法需要有严格的检测环境,而莫尔条纹法则需要在试件表面搭建极密的网格,在工艺上难度较大[3]。由于这些方法的各种缺欠,从20世纪70年代开始,散斑法测位移凭借其非接触式测量、系统简单、抗干扰能力强等优点[4-7],逐渐成为微小位移测量中的热点技术之一。
由于散斑照相技术在测量位移方面有着诸多的优势,现在已经有大量的应用[8-9],而如何有效处理散斑图从而准确得到移动量一直是该方法的研究热点。为了对散斑图的位移量进行准确测量,在数字图像技术出现后,传统的处理方法[10-11]是对位移前后的散斑图在空域进行像素的相加或相减,然后对得到的图像作滤波除噪、图像增强、二值化和条纹细化处理,最后进行条纹间距提取从而得到移动量。传统方法步骤繁琐,运算量大,不便操作。也有研究者直接用傅里叶变换实现位移量检测,但由于直接使用光强信息,最小可检测移动量(灵敏度)受散斑尺寸限制。因此,本文中提出一种基于相位的散斑照相位移量计算方法,处理得到的散斑图条纹清晰,处理的步骤也相对简便,同时可以提高最大和最小移动量的检测限。作者在进行理论分析的基础上给出了相应的实验验证,证实了新方法的有效性。
-
目前应用到实际检测的散斑检测法,大致分为散斑干涉术[10]和散斑照相术两种,而散斑照相术根据散斑的观察方式又分为主观散斑和客观散斑[12],它们都是直接将位移前、后的散斑图记录下来,区别只是是否在记录介质前加入光学透镜或者光学系统。其基本原理都是将位移前、后的散斑图叠加在同一张底片上,由于两个散斑图强度分布完全相同,仅有微小的相对位移,散斑图中的各个斑点成对出现,恰好构成大量孔径大小和形状不同、但间距相同的杨氏双孔[13],当然,条件是散斑的移动量要大于散斑颗粒的尺寸。利用杨氏双孔的衍射特点就可以得到双孔间的距离,即散斑图的移动量,从而求得被测物的面内移动量。
-
在传统的散斑照相术中,移动量的提取方法[14-16]通常有逐点分析法[17]和全场分析法。在数字图像技术广泛应用前,逐点分析法用细激光束逐点照射叠加有移动前、后散斑图的底片,观察远场夫朗禾费衍射图样[18],散斑点对形成杨氏干涉条纹,其间距和方向与被测物体的移动距离和方向有关,测量杨氏条纹间距和方向就可以得到物体的位移信息。在数字图像技术广泛应用后,人们用光电转换器件[19](如电荷耦合器件(charge-coupled device,CCD)或互补金属氧化物半导体(complementary metal oxide semiconductor,CMOS))替代了原先的感光胶片,用图像采集卡和计算机将散斑图直接记录为数字散斑图,称为数字散斑照相,移动量的提取也借助计算机处理完成。
数字散斑照相[20-21]只能记录单幅散斑图,若将位移前的散斑图记为f1(x, y),移动之后的散斑图记为f2(x, y),数字散斑照相提取面内位移量需要联用这两幅数字化的散斑图[22]。设被测物体面内移动后,散斑图在x方向和y方向的移动量分别为Δx和Δy,要得到位移前后的散斑点对,应该直接将f1(x, y)和f2(x, y)相加,但为了减小随机噪声[23-24]的影响,传统数据处理方法采用相减模式,即将f1(x, y)和f2(x, y)相减得到合成数字散斑图f(x, y):
$ \begin{array}{*{20}{c}} {f\left( {x,y} \right) = {f_1}\left( {x,y} \right) - {f_2}\left( {x,y} \right) = }\\ {{f_1}\left( {x,y} \right) - {f_1}\left( {x - \Delta x,y - \Delta y} \right)} \end{array} $
(1) 接着,通过对合成散斑图作傅里叶变换,用以模拟实际的夫朗禾费衍射过程:
$ \begin{array}{*{20}{c}} {F\left( {u,v} \right) = \iint {f\left( {x,y} \right)\exp \left[ { - {\text{j2π }}\left( {ux + vy} \right)} \right]{\text{d}}x{\text{d}}y} = } \\ {{F_1}\left( {u,v} \right)\left\{ {1 - \exp \left[ { - {\text{j}}2{\text{π }}\left( {u\Delta y + v\Delta y} \right)} \right]} \right\}} \end{array} $
(2) 式中, F(u, v)是合成散斑图的傅里叶变换,而F1(u, v)是移动前散斑图的傅里叶变换。由此可以直接得出合成散斑图夫琅禾费衍射的光强分布I(u, v)(即傅里叶变换的功率谱):
$ \begin{array}{*{20}{c}} {I\left( {u,v} \right) = F\left( {u,v} \right){F^ * }\left( {u,v} \right) = }\\ {4{I_1}\left( {u,v} \right){{\sin }^2}\left[ {{\rm{ \mathsf{ π} }}\left( {u\Delta x + v\Delta y} \right)} \right] = }\\ {2{I_1}\left( {u,v} \right)\left\{ {1 - \cos \left[ {2{\rm{ \mathsf{ π} }}\left( {u\Delta x + v\Delta y} \right)} \right]} \right\}} \end{array} $
(3) 式中,I1(u, v)=F1(u, v)F1*(u, v),是移动前散斑图傅里叶变换的功率谱分布; *表示复共轭。
从(3)式可以看到,合成散斑图傅里叶变换的功率谱被一个正弦函数的平方调制,可以用余弦函数展开,其变量中含有面内位移量Δx和Δy。
传统的散斑照相技术提取位移量通常直接利用合成散斑图傅里叶变换的功率谱进行,处理的过程包括对功率谱(叠加有被正弦函数的平方调制生成的干涉条纹)滤除噪声、图像增强、二值化、条纹细化和条纹间距提取。若记录散斑图的光电转换器件(CCD或CMOS)的尺寸为Lx×Ly,像素数为Nx×Ny,作离散傅里叶变换可以得到其频谱,其中x方向的频率u在$\frac{{ - {N_x}}}{{2{L_x}}}\sim\frac{{{N_x}}}{{2{L_x}}} $之间变化,y方向的频率v在$ \frac{{ - {N_y}}}{{2{L_y}}}\sim\frac{{{N_y}}}{{2{L_y}}} $之间变化。若拍摄散斑图时,$ \Delta x = \frac{{{L_x}}}{{{N_x}}} $,Δy=0,即散斑场仅在x方向移动一个像素,则按(3)式,其合成散斑图傅里叶变换的功率谱相邻两条明纹在x方向的间距应为Nx。于是,如果测得干涉条纹在x方向和y方向的间距(像素数)分别为nx和ny,则可求出散斑图的位移量:
$ \left\{ \begin{array}{l} \Delta x = \frac{{{L_x}}}{{{n_x}}}\\ \Delta y = \frac{{{L_y}}}{{{n_y}}} \end{array} \right. $
(4) 传统方法原理简单,但选用的图像处理过程比较繁杂,特别是(3)式中叠加有散斑图傅里叶变换的功率谱I1(u, v),使得条纹之间的最大间隔必须小于散斑颗粒在频域所形成的艾里斑直径才能检测得到,即散斑场移动量要大于(至少等于)散斑颗粒的平均直径,原理上能够检测的最小位移量(灵敏度)受此限制。其次,被测物体的位移量不能太大,因为条纹间距与物体的位移成反比,位移过大会导致提取的干涉条纹特别密集,原理上可以提取到的最小间距为2个像素[25],对应的散斑图最大位移量为$\frac{{{L_x}}}{2} $和$ \frac{{{L_y}}}{2} $。但实际中,受散斑噪声本身的影响,干涉条纹中心线不是完全平行的直线,会有很多相互连接的网状分叉,所以可以提取到的最小间距大于2个像素,即可以检测的最大位移量小于$ \frac{{{L_x}}}{2}$和$ \frac{{{L_y}}}{2} $。显然,建立一种新的位移量提取算法是有必要的。
-
同样设被测物体在x和y方向面内移动,散斑图移动量为Δx和Δy,记录下的散斑图分别为f1(x, y)和f2(x, y),通常可以认为f2(x, y)=f1(x-Δx, y-Δy)。对f1(x, y)和f2(x, y)分别作傅里叶变换:
$ {F_1}\left( {u,v} \right) = \iint {{f_1}\left( {x,y} \right)\exp \left[ { - {\text{j2 π }}\left( {ux + vy} \right)} \right]{\text{d}}x{\text{d}}y} $
(5) $ \begin{array}{*{20}{c}} {{F_2}\left( {u,v} \right) = \iint {{f_2}\left( {x,y} \right)\exp \left[ { - {\text{j2 π }}\left( {ux + vy} \right)} \right]{\text{d}}x{\text{d}}y} = } \\ {{F_1}\left( {u,v} \right)\exp \left[ { - {\text{j2 π }}\left( {u\Delta x + v\Delta y} \right)} \right]} \end{array} $
(6) (6) 式的推导中用到了傅里叶变换的相移定理。比较(5)式、(6)式可以看到,移动前后散斑图的频谱仅相差一个线性变化的相位2π(uΔx+vΔy),而且变化量与位移量成正比,求出该线性变化的相位并作余弦运算,可以得到一组在x方向和y方向频率分别为Δx和Δy的余弦条纹图,记为I′(u, v):
$ \begin{array}{*{20}{c}} {I'\left( {u,v} \right) = \cos \left\{ {{\rm{angle}}\left[ {\frac{{{F_2}\left( {u,v} \right)}}{{{F_1}\left( {u,v} \right)}}} \right]} \right\} = }\\ {\cos \left[ {2{\rm{ \mathsf{ π} }}\left( {u\Delta x + v\Delta y} \right)} \right]} \end{array} $
(7) 注意,(7)式中没有出现散斑场自身的功率谱,式中angle{}代表计算复数的相位(相角),(3)式中导致最小可检测位移量至少等于散斑平均直径的I1(u, v)被方便地去除。由于该方法完全利用散斑图频谱的相位关系,将之称为“相位算法”。
下面来分析新方法可以检测到的最小和最大位移量。设记录散斑图的光电转换器件(CCD或CMOS)的尺寸为Lx×Ly,像素数为Nx×Ny,即像元间距分别是$ \frac{{{L_x}}}{{{N_x}}} $和$ \frac{{{L_y}}}{{{N_y}}}$。则I′(u, v)作离散傅里叶变换可以得到其频谱,记为F′(ζ, η)。根据离散傅里叶变换的性质,x方向的频率ζ在$ \frac{{ - {L_x}}}{{2{N_x}}}\sim\frac{{{L_x}}}{{2{N_x}}} $之间变化,有Nx个采样点,y方向的频率η在$ - \frac{{{L_y}}}{{2{N_y}}}\sim\frac{{{L_y}}}{{2{N_y}}} $之间变化,有Ny个采样点。以x方向的移动为例,若拍摄散斑图时,Δx=$ \frac{{{L_x}}}{{{N_x}}} $,即在x方向移动一个像素,频率ζ=Δx=$ \frac{{{L_x}}}{{{N_x}}} $,该频率出现在离零频一个像素的位置,所以该方法可以检测的最小面内位移为Δx=$ \frac{{{L_x}}}{{{N_x}}} $,恰好为像元的间距,与散斑尺寸无关。注意到实际拍摄散斑图时有噪声存在,(5)式和(6)式中F1(u, v)与F2(u, v)的振幅通常不完全相等,所以I′(u, v)频谱的零频F′(ζ=0, η=0)≠0,其宽度至少等于2个像素,由于它要与相位项的频谱卷积,所以可以检测的最小位移量应该为Δx=2$ \frac{{{L_x}}}{{{N_x}}} $。由于频率ζ的最大值为$ \frac{{{L_x}}}{2} $,出现在频域的边缘,所以该方法可以检测的最大面内位移为Δx=$ \frac{{{L_x}}}{2} $,如果,Δx > $ \frac{{{L_x}}}{2} $将出现混叠。y方向的移动与x方向类似,不再赘述。
显然,如果在用新算法求得I′(u, v)的频谱中,信号的频谱出现在距离零频nx′和ny′个像素处,则散斑图在x方向和y方向的面内位移量Δx和Δy分别为:
$ \left\{ \begin{array}{l} \Delta x = {{n'}_x}\frac{{{L_x}}}{{{N_x}}}\\ \Delta y = {{n'}_y}\frac{{{L_y}}}{{{N_y}}} \end{array} \right. $
(8) 式中,2≤nx′≤$ \frac{{{N_x}}}{2} $,2≤ny′≤$ \frac{{{N_y}}}{2} $,又因为Δnx′=Δny′=1,所以x和y方向散斑位移分辨率均为1倍像元间距。
-
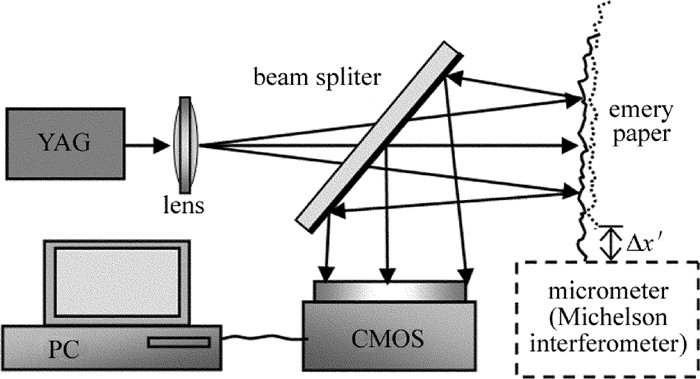
设计了如图 1所示的光路验证新算法。YAG激光器的激光束(波长λ=0.533μm)经扩束镜扩为球面光波,垂直照射在可移动物体(砂纸)上,物体在面内作整体移动,记录客观散斑场。BS是分束镜(beam splitter, BS)。散斑场记录面(放置有分辨率为1744×1308像素的CMOS,像元间距为3.2μm×3.2μm)和光源(扩束镜后表面)沿光轴到被测物体的距离分别为L和Z。实验中可移动物体与测微螺旋计(或迈克尔逊干涉仪)相连,因而可以方便地得到实际移动量。

Figure 1. Experiment setup
这里需要说明的是,由于用球面光波照射,当物体在面内移动Δx′时,散斑图实际相应发生Δx的移动,各量之间的关系为:
$ \Delta x = \Delta x'\left( {\frac{{1 + L}}{Z}} \right) $
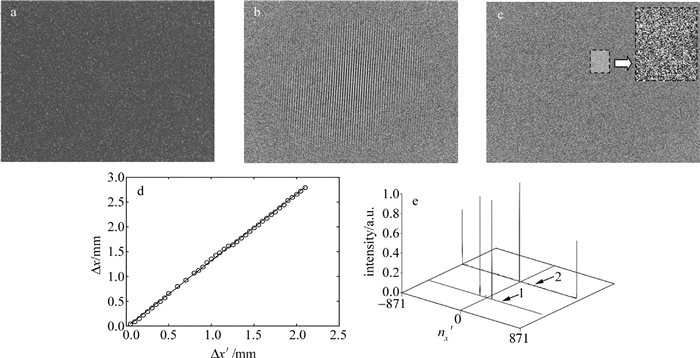
(9) 先测试系统的最大检测值。将砂纸与测微螺旋仪相连,取Z=1150.0mm和L=390.0mm。按(8)式,可以测量的最大散斑图位移为Δx=1744×3.2/2μm=2.790mm; 按(9)式,此时物体的实际位移量Δx′应为2.084mm。开始测量时,首先记录一幅物体位移前的散斑图,然后旋转测微螺旋仪的棘轮,带动砂纸移动,每次移动0.050mm,记录移动距离和散斑图。然后按(6)式~(8)式处理散斑图,计算Δx(单向移动,Δy=0mm),最后拟合Δx与Δx′的实验曲线,计算物体实际位移量,并与测微螺旋仪的结果相比较。实验结果如图 2和表 1所示。
Table 1. Experimental data of Δx′and nx′
Δx′/mm nx′ Δx′/mm nx′ Δx′/mm nx′ 0.050 13 0.850 350 1.500 618 0.100 26 0.900 372 1.550 638 0.150 46 0.950 401 1.600 659 0.200 68 1.000 422 1.650 680 0.250 90 1.050 444 1.700 703 0.300 112 1.100 463 1.750 719 0.350 134 1.150 483 1.800 743 0.400 154 1.200 503 1.850 762 0.450 178 1.250 512 1.900 790 0.500 205 1.300 532 1.950 811 0.600 249 1.350 553 2.000 830 0.700 289 1.400 574 2.050 850 0.800 333 1.450 597 2.100 871 图 2a~图 2c的大小均为1744pixel×1308pixel。图 2a是实验记录的一幅散斑图;图 2b是Δx′=0.250mm时I′(u, v)的分布;图 2c是Δx′=2.100mm时I′(u, v)的分布,可以看到条纹非常密集,无法用条纹细化的方法处理,为方便观察,给出了局部放大图(虚线框内);图 2d是Δx′与Δx的实验数据分布,具体数据见表 1;图 2e中曲线1是图 2b频谱的剖线,而曲线2是图 2c频谱的剖线。曲线2中除零频外,谱线出现在nx′=±871处,即频域的边缘处,这是系统可以检测到的最大散斑图位移量,其值Δx=871×3.2μm=2.787mm,与理论分析一致。
测得nx′后按(8)式计算Δx,得到Δx与Δx′实验拟合曲线为(单位为mm):
$ \Delta x = 1.343\Delta x' - 0.0000292 $
(10) 拟合曲线Δx的斜率为1.343,而按(9)式计算得到的值应为1.339,两者是非常吻合的,也证明(9)式是正确的,即:用球面相干光波照射散射物体,是可以放大位移量的。
接下来测试系统的最小检测值。将与砂纸相连的测微螺旋仪换成迈克尔逊干涉仪,直接用波长为0.533μm的细激光束照射(移除扩束透镜)砂纸,目的是得到平均尺寸较大的散斑图。按(8)式可以测量的最小散斑图位移为Δx=2×3.2μm=6.4μm。开始测量时先记录一幅物体位移前的散斑图,然后旋转用氦氖激光(波长为0.633μm)照明的迈克尔逊干涉的棘轮,带动砂纸移动,每移动一个干涉环(砂纸移动0.633/2=0.316μm)记录一幅散斑图。然后按(6)式~(8)式处理散斑图,给出干涉环移动个数N分别为1~50时,I′(u, v)各自的频谱剖线(过零频,低频部分,为方便比较已经作归一化处理),结果如图 3所示。
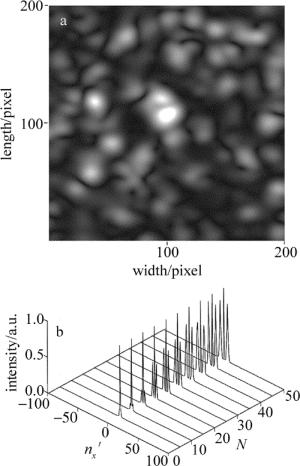
Figure 3. a—speckle pattern of the local area b—spectral lines of N=5, 10, 15, 20, 25, 30, 35, 40, 45 and 50
图 3a给出了散斑图(局部),而图 3b给出了N分别为5, 10, 15, 20, 25, 30, 35, 40, 45和50时的频谱剖线。从图 3b可以看到,当干涉环移动个数N=5时,没有出现侧峰,因为位移量小于1个像素的大小;当干涉环移动个数N为10和15时,散斑图移动量Δx分别为3.16μm和4.75μm,频谱中零频两侧出现小的尖峰,但位置都在nx′=±2处(尽管强度不同),但曲线沟谷处的频谱值远大于0,说明这是因为频谱有混叠的结果,不能准确测量位移量;直到干涉环移动个数N=20时,散斑图移动量为Δx=6.33μm,非常接近两个像素,频谱中零频两侧尖峰的位置仍在nx′=±2处出现,但曲线沟谷处频谱值接近0,这才是正确的频率;继续旋转迈克尔逊干涉的棘轮,在干涉环移动数N为30~35,40~45和50时,分别在nx′为±3, ±4和5处出现尖峰,且相对强度不断增加,说明分辨率为Δnx′=1即Δx的相邻差值为1倍像元间距,与理论分析的结果一致。需要说明的是,从图 3a可以看到, 拍摄的散斑图平均尺寸远大于2pixel,但可以检测的最小位移为2pixel,说明新方法的散斑图可检测最小位移量不受散斑自身尺寸限制。
-
散斑照相计算面内位移的传统算法直接使用散斑图傅里叶变换的功率谱信息,导致最小可检测位移量受散斑尺寸限制,针对这个问题,提出了基于散斑图傅里叶变换相位信息的新算法,给出了理论分析,证明最小和最大可检测位移量取决于所用光电转换器件(如CCD或CMOS)的像元间距和大小,分别为2倍像素间距和光电转换器件光敏面宽度的一半,与散斑尺寸无关。本文中给出了实验验证,结果与理论分析吻合。
基于傅里叶变换相位的散斑面内位移量算法
Algorithm of in-plane displacement measured by speckle photography based on phase of Fourier transform
-
摘要: 散斑照相计算面内位移时,传统算法直接使用散斑图傅里叶变换的功率谱信息,最小可检测位移量会受到散斑尺寸的限制。为了解决这一问题,采用基于傅里叶变换相位信息的新算法进行了理论分析,证明了新方法中最小和最大可检测位移量取决于所用光电转换器件(如CCD或CMOS)的像元间距和光敏面大小,与散斑尺寸无关。结果表明,该方法的测量范围最小可达2pixel间距,最大可达光电转换器件光敏面宽度的一半。实验测量与理论值吻合。Abstract: Traditional algorithm of in-plane displacement measurement by speckle photography is based on the power spectrum of Fourier transform directly. However, the measured minimum displacement is limited by speckle size. In order to solve this problem, a novel algorithm based on the phase angle of Fourier transform was proposed. Theoretical analysis showed that the minimum and maximum displacement measured by this new algorithm was determined by the photoelectric converter, such as charge-coupled device or complementary metal oxide semiconductor. The size of speckle patterns had no effect on displacement. The result shows that the minimum and maximum displacement measured by new method can achieve 2pixel spacings and the half of photo-sensitive area width of photoelectric conversion device respectively. The actual measurement is in agreement with the theoretical analysis.
-
Key words:
- Fourier optics /
- speckle metrology /
- phase method /
- speckle photography /
- in-plane displacement
-
Figure 3. a—speckle pattern of the local area b—spectral lines of N=5, 10, 15, 20, 25, 30, 35, 40, 45 and 50
Table 1. Experimental data of Δx′and nx′
Δx′/mm nx′ Δx′/mm nx′ Δx′/mm nx′ 0.050 13 0.850 350 1.500 618 0.100 26 0.900 372 1.550 638 0.150 46 0.950 401 1.600 659 0.200 68 1.000 422 1.650 680 0.250 90 1.050 444 1.700 703 0.300 112 1.100 463 1.750 719 0.350 134 1.150 483 1.800 743 0.400 154 1.200 503 1.850 762 0.450 178 1.250 512 1.900 790 0.500 205 1.300 532 1.950 811 0.600 249 1.350 553 2.000 830 0.700 289 1.400 574 2.050 850 0.800 333 1.450 597 2.100 871  下载: 导出CSV
下载: 导出CSV
-
[1] GAO Sh L, XU Sh L.Critical concrete crack length determination using strain gauges[J].Journal of Qinghuan University(Natural Science Edition), 2007, 47(9):1432-1434(in Chinese). [2] WANG W, HE X Y, YI L. Application of optical method to the measurement of concrete surface crack[J].Journal of Dongnan University(Natural Science Edition), 2005, 35(s1):19-22(in Chinese). [3] LI W H, ZHANG Ch Sh, BAYINHEXIGE. Study on precisely controlling the grating contant of holographic grating with moire pattern method[J].Chinese Journal of Scientific Instrument, 2013, 34(12):2867-2873(in Chinese). [4] CHEN Ch, GUO X M, MA J, et al. Measurement of surface roughness based on laser angular-speckle correlation method[J]. Laser Technology, 2015, 39(4):497-500(in Chinese). [5] ZHOU C L, LI F, WANG Y Sh. Large displacement measurement using ESPI[J]. Journal of Optoelectronics·Laser, 2005, 16(12):1472-1475(in Chinese). [6] CHEN D J, CHIANG F P, TAN Y S, et al. Digital speckle-displacement measurement using a complex spectrum method[J]. Applied Optics, 1993, 32(11): 1839-1849. doi: 10.1364/AO.32.001839 [7] MEINLSCHMIDT P, HINSCH K D, SIROHI R S. Selected papers on electronic speckle pattern interferometry: principles and practice[M].Bellingham, USA: Society of Photo Optical, 1996:131-132. [8] WANG Q, HUANG L Q, WANG Y Ch. Real-time method of measuring little displacement by speckle photography[J].Acta Optica Sinica, 2003, 32(8):1010-1012(in Chinese). [9] SJÖDAHL M. Electronic speckle photography: increased accuracy by nonintegral pixel shifting[J]. Applied Optics, 1994, 33(28): 6667-6673. doi: 10.1364/AO.33.006667 [10] WANG J, HE F T, CAO J F, et al. Research of laser speckle suppression method based on fiber vibration[J].Laser Technology, 2015, 39(5):666-668(in Chinese). [11] HAN Y J.The compassion of filters for digital speckle fringe pattern based on MATLAB[J]. Electronic World, 2013(8):169-170(in Chinese). [12] ZHOU Y. Measurement of displacement in-plane based on digital speckle photography[D]. Changchun:Changchun University of Technology, 2011:6-12(in Chinese). [13] MA J Y, ZHAO Zh M, GUO L F. Research on double-beam laser speckle photography[J]. Applied Laser, 2006, 26(1):49-51(in Chinese). [14] LAI H K, CHEN P, HUANG X L. Numerical display of in-plane displacement measurement by speckle photography[J]. Journal of Xiamen University(Natural Science Edition), 2000, 39(6):770-774(in Chinese). [15] LIU Ch, GAO Sh M. Digital speckle photography based on image processing[J].Acta Optica Sinica, 1999, 19(10):1396-1400(in Chinese). [16] REN Sh Y, LIU G D, ZHUANG Zh T. Research on error factors and improving resolution of conoscopic holography measurement system[J].Chinese Journal of Scientific Instrument, 2009, 30(5):1100-1104(in Chinese). [17] YE L.The longitudinal dimension of laser speckle[J].Journal of Optoelectronics·Laser, 1995, 6(4):228-231(in Chinese). [18] GUI J B, SONG Q H, LI J Ch, et al. Realization and comparison of wave front reconstruction algorithms commonly used in colour digital holography[J].Laser Technology, 2015, 39(2):176-181(in Chinese). [19] ZHU Y H, HE F T, PENG X L. Research of characteristics of laser speckle of plastic optical fiber[J].Laser Technology, 2016, 40(1):122-125(in Chinese). [20] ZHANG D, AROLA D D. Applications of digital image correlation to biological tissues.[J]. Journal of Biomedical Optics, 2004, 9(4):691-699. doi: 10.1117/1.1753270 [21] WANG Y, CUITIÑO A M. Full-field measurements of heterogeneous deformation patterns on polymeric foams using digital image correlation[J]. International Journal of Solids & Structures, 2002, 39(13/14):3777-3796. [22] ZHANG W J, HUANG F, WANG W Sh. Three-dimensional deformation testing based on laser speckle photography[J].Laser and Optoelectronics Progress, 2011, 45(11):111-116(in Chinese). [23] FANG Sh P. Optimization design of phase noise of adjustable RF signal of optical transmission systems[J].Laser Technology, 2016, 40(4): 582-585(in Chinese). [24] SHI Y L, ZHANG Y, SUN L J. Influence of lasers on phase noise of optoelectronic oscollators[J].Laser Technology, 2015, 39(6):761-764(in Chinese). [25] LU H Z, TU M L, JI Ch D, et al. Micro displacement measurement method based on laser focus deviation[J].China Journal of Scientific Instrument, 2016, 37(2):461-466(in Chinese). -

 点击查看大图
点击查看大图
图(3) / 表(1)
计量
- 文章访问数: 3106
- HTML全文浏览量: 2044
- PDF下载量: 398
- 被引次数: 0
