 网站地图
网站地图

 下载:
下载:

-
快速反射镜(fast steering mirror, FSM)是一种可以精确地调整光束传播方向的光学仪器,具有谐振频率高、动态响应快等特点,因此被广泛应用在激光通信技术中[1-5]。作为激光通信技术的重要组成部分,FSM性能的优劣直接影响到整个激光通信系统性能优劣。
FSM的控制系统通常采用比例-积分-微分(proportion-integral-differential,PID)控制器[6-8],对控制参量的设计方法主要有不完全微分控制法、零极点相消法和陷波器法等[9-13]。采用这些方法设计FSM控制参量时,主要出发点都是为了减弱机械谐振对系统的影响,因为谐振峰的存在会影响系统的稳态裕度。这可以保证系统具有较高的闭环控制带宽,具有优秀的频域性能,但由于这些方法在设计控制参量的过程没有考虑系统的时域性能,这可能会造成系统的动态性能不能达到设计要求。
针对以上问题,本文中提出一种改进根轨迹的快速反射镜控制参量设计方法,通过时域性能指标要求确定理想的频域根轨迹,进而得到控制器的控制参量。
-
音圈电机驱动的快速反射镜通过两对正交分布并且相互独立控制的驱动器实现对反射镜的推拉作用,反射镜的两个运动轴之间耦合度较小,因此音圈电机驱动的快速反射镜的机械部分在1维方向上可以简化成一个单自由度的扭振系统[13],实际工作中如果模型偏离了1维模型,即两个运动轴间出现了模态的耦合,那么在分析模型时应该先对耦合的模态进行解耦,再对模型进行单维分析。音圈电机可以简化为一个RL电路,因此可以将音圈电机驱动的快速反射镜的传递函数G(s)写成:
$ G\left( s \right) = \frac{{\theta \left( s \right)}}{{U\left( s \right)}} = \frac{{{q_1}}}{{\left( {{q_2}{s^2} + {q_3}s + 1} \right)\left( {{q_4}s + 1} \right)}} $
(1) 式中,s为传递函数参量,θ(s)是反射镜转角的拉式变换,U(s)是音圈电机电压的拉式变换,q1,q2,q3,q4是待辨识的FSM参量。将G(s)表示为零极点形式:
$ G\left( s \right) = \frac{K}{{\left( {s + {p_1}} \right)\left( {s + {p_2}} \right)\left( {s + {p_3}} \right)}} $
(2) 式中,K, p1, p2, p3是将快速反射镜的传递函数G(s)表示成零极点形式时的待求系数。
PID控制器的传递函数为:
$ G\left( s \right) = {k_{\rm{p}}} + {k_{\rm{i}}}{s^{ - 1}} + {k_{\rm{d}}}s $
(3) 式中,kp,ki,kd分别是比例、积分、微分系数。为了消除2阶环节的影响,在FSM的PID控器的微分环节引入滤波环节[12],并对其进行形式转换,可得:
$ {G_{\rm{c}}}\left( s \right) = \frac{{{k_{\rm{d}}}{s^2} + {k_{\rm{p}}}s + {k_{\rm{i}}}}}{{s\left( {s + T} \right)}} = \frac{{{k_{\rm{d}}}\left( {s + {z_1}} \right)\left( {s + {z_2}} \right)}}{{s\left( {s + T} \right)}} $
(4) 式中,T是滤波环节的时间常数, z1和z2为控制器的零点。从根轨迹的角度看,PID控制器可以看成在原点处有一个极点、在实轴左半部分配置一个极点、在s域的左半平面可以任意配置两个零点的一种传递函数。
加入控制环节后,FSM系统的开环传递函数为:
$ \begin{array}{*{20}{c}} {L\left( s \right) = G\left( s \right){G_{\rm{c}}}\left( s \right) = }\\ {\frac{{{K^ * }\left( {s + {z_1}} \right)\left( {s + {z_2}} \right)}}{{s\left( {s + {p_1}} \right)\left( {s + {p_2}} \right)\left( {s + {p_3}} \right)}}} \end{array} $
(5) 式中,K*=K×kd,系统中引入了一个积分环节,可以保证系统的位置稳态误差为零[14]。
-
中国科学院光电技术研究所的LIN对某型快速反射镜进行了测试,辨识出来的受控快速反射镜传递函数为[6]:
$ G\left( s \right) = \frac{{115000}}{{0.004{s^3} + 1.01{s^2} + 57.94s + 65720}} $
(6) 将其表示成标准零极点形式:
$ G\left( s \right) = \frac{{288995000}}{{\left( {s + 2480} \right)\left( {s + 16 + 258{\rm{j}}} \right)\left( {s + 16 - 258{\rm{j}}} \right)}} $
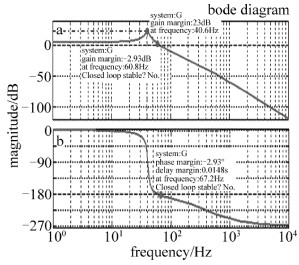
(7) 图 1是受控快速反射镜的开环频响特性曲线。可以看到, 系统存在机械谐振,谐振峰出现在41Hz处。
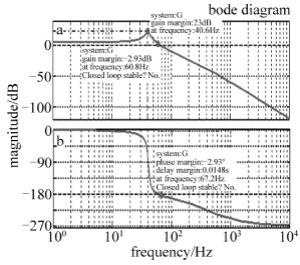
Figure 1. Opened-loop Bode diagram of the controlled FSM
给定快速反射镜闭环控制系统的设计指标[2]是:闭环带宽大于200Hz,超调量小于10%,调节时间小于80ms(按照2%准则)。由此可以推知闭环控制系统的阻尼比应该为ζ≥0.6。根据调节时间Ts的设计要求可得:
$ {T_{\rm{s}}} = \frac{{4.4}}{{\zeta \omega }} = 0.08s $
(8) 式中,Ts是调节时间,ω是自然振荡频率。
取阻尼比ζ=0.6,由阻尼比ζ和自然振荡频率ω间的相互关系,将系统的预期的主导极点取为:
$ \left\{ \begin{array}{l} p = - 55 + {\rm{j}}73.6\\ \hat p = - 55 - {\rm{j}}73.6 \end{array} \right. $
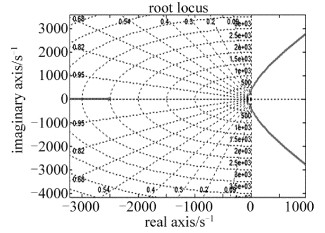
(9) 图 2是从未经校正的快速反射镜闭环系统的根轨迹。从图中可以看到, 未校正系统没有经过预期主导极点,并且不稳定,所以需要对原系统进行校正。
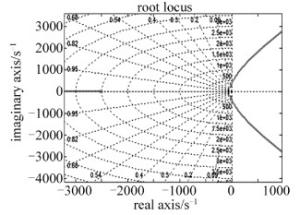
Figure 2. Closed-loop root locus of FSM before correcting
从图中2还可以看到,跟预期主导极点相比,两个共轭开环极点距离虚轴更近,因此开环极点比预期主导极点更具有主导性,为此可以将控制器的的零点直接配置在两个开环极点旁边,使其丧失主导性。据此,取控制器的零点为:
$ \left\{ \begin{array}{l} {z_1} = 20 + {\rm{j}}258\\ {z_2} = 20 - {\rm{j}}258 \end{array} \right. $
(10) 根据模值条件[15],可以得到校正后系统增益为K*=21203240。根据相角条件,可以得到滤波环节的时间常数T=115。
校正后的系统开环传递函数为:
$ \begin{array}{*{20}{c}} {G\left( s \right) = }\\ {\frac{{21203240\left( {{s^2} + 40s + 65936} \right)}}{{s\left( {{s^3} + 2546{s^2} + 145600s + 165154360} \right)\left( {s + 115} \right)}}} \end{array} $
(11) 由上式可以得到FSM系统控制参量为:
$ {k_{\rm{d}}} = 0.00064,{k_{\rm{p}}} = 0.0255,{k_{\rm{i}}} = 42,T = 115 $
(12) -
图 3是快速反射镜控制系统的实验示意图。从图 3中可以看到,音圈电机驱动的快速反射镜的实际控制系统是由光栅测微仪提供位置信息的闭环反馈系统,整个系统主要由数字控制器、功率放大器、A/D及D/A接口等组成。其中,数字控制器通过工控机实现,功率放大器作为驱动元件,可以接收数字信号,A/D及D/A接口分别实现数字模拟信号间的相互转换。
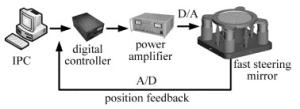
Figure 3. Diagram of FSM control system
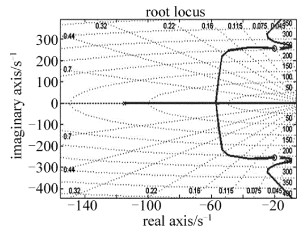
图 4是采用改进根轨迹法后FSM闭环控制系统的根轨迹。从图 4中可以看到,校正后的根轨迹通过预期的主导极点。
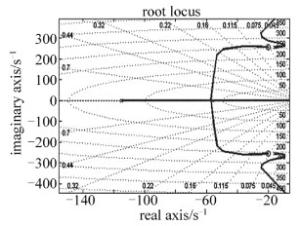
Figure 4. Root locus of the controlled closed-loop FSM
在Simulink环境下搭建快速反射镜的仿真控制模型。与实际实验相比,仿真实验的结果无法表现出信号转换的时间延迟以及系统中存在的扰动对控制系统的影响,但考虑到在相同的控制策略下,无论采用哪些控制参量,这些客观影响都是存在的,所以仍然可以采用仿真实验获得的性能参量来测试不同控制参量对系统的影响。
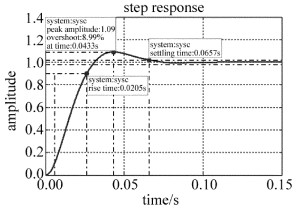
图 5是采用改进轨迹法设计控制参量的FSM闭环控制系统的阶跃响应。从图中可以看到,系统的超调量为9%,调节时间为0.0657s,与设计之初的指标相比,性能分别提高了10%和17.87%。
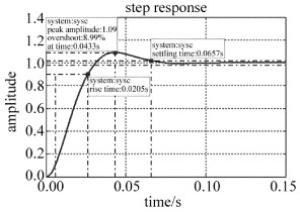
Figure 5. Step response of the controlled closed-loop FSM
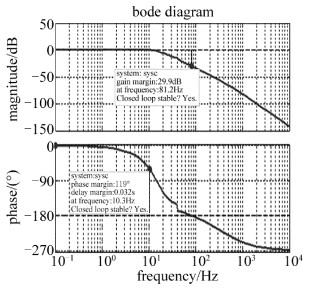
图 6是采用改进轨迹法后FSM闭环系统的幅相特性曲线。从图中可以看到,系统的谐振峰消失。这是由于将控制器的零点配置在FSM的极点位置附近,相当于由控制器引入了一个2阶微分环节,这个2阶微分环节恰好抵消了FSM的震荡环节。这表明采用改进根轨迹法设计的PID控制参量可以有效改善系统的机械谐振。
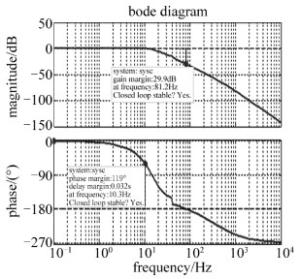
Figure 6. Frequency response diagram of the controlled closed-loop FSM
-
快速反射镜的动力学模型由一个2阶振荡环节和一个惯性环节组合构成,它具有两个共轭和一个位于一个位于实轴的开环极点。带滤波环节的PID控制器可以为控制系统提供两个零点及两个极点。位于复平面原点的极点可以使得系统的在阶跃信号的作用下稳态误差为零。将PID控制器引入的两个零点分别配置在两个共轭的极点附近,可以抵消FSM结构的振荡环节的作用,使得这两个极点丧失主导性。根据相角条件计算出滤波时间常数,并将其配置在系统中,可以使得根轨迹经过预期的主导极点。经实验验证,采用改进根轨迹法设计的FSM系统控制参量不仅能够保证系统具有良好的动态性能,还可以有效地改善FSM结构的机械谐振。
改进根轨迹的快速反射镜控制参量设计
Design of control parameters for fast steering mirrors by improving root locus
-
摘要: 为了保证快速反射镜控制系统在时域和频域同时具有良好性能,采用了一种改进根轨迹的控制参量设计方法。首先,根据辨识出的模型,建立音圈电机驱动的快速反射镜传递函数的根轨迹;其次,根据对控制系统性能指标的要求,导出闭环控制系统预期主导极点位置;再次,通过配置控制器的零点位置,使系统的根轨迹具有预期的主导极点;最后,根据模值公式和相角公式,确定系统增益和控制器极点位置。结果表明,采用改进根轨迹法设计的控制系统具有良好的动态性能,还可以有效抑制闭环系统的机械谐振,而且简单易行、通用性强。Abstract: In order to obtain good time and frequency domain quality of a fast steering mirror (FSM), a method based on improving root locus was used to design its control parameters. At first, the root locus of FSM driven by a voice coil motor was established according to the identificated dynamic model. Then the expected dominant pole position was calculated based on the performance specification of the control system. By configuring the zero position of the controller, the root locus of the system was expected to have the dominant pole. Finally, the gain of system and the pole position of controller were obtained according to the modulus value formula and phase angle formula. The results show that the FSM control system based on the improved root locus algorithm has good dynamic performance and can suppress the mechanical resonance efficiently. The method is feasible and versatile.
-
Key words:
- laser technique /
- fast steering mirror /
- root locus /
- control parameter
-
-

 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 2914
- HTML全文浏览量: 1643
- PDF下载量: 302
- 被引次数: 0
