 网站地图
网站地图

 下载:
下载:
-
为了提高风廓线数据测量的准确度,降低低空风切变对飞行器起降落的威胁程度[1-3],近年来对测风雷达探测的径向风矢量反演3-D风场的信息中一般使用速度方位显示法、扩展速度方位显示法、体积速度处理法、速度方位处理法、匀速风场法、涡度-散度法等[4-6]。这些反演方法中基本附加了线性、局部均匀等强加假设条件,反演质量受限。国内外学者对提高雷达资料的质量做了大量工作。ZHANG[7]等人研究了风场干扰中生物的回波辨别踢除方法。ZHU等人[8]对风廓线数据做了平滑信号处理传送数据、对称性踢除杂波峰,前后一致性平均等预处理。在风廓线数据质量控制上对干扰信号如杂波干扰、噪声干扰都做了预处理。YU[9]介绍了使用拟合均方根误差及对称性的数据控制方法。在实际的雷达探测过程中风场收到扰动,风廓线观测常常有较大误差,风场准确性更加受限。
作者提出对时间域上风廓线数据使用后向传播灰色算法(back propogation grey method, BP-GM)进行控制。灰色算法最大的特点是可利用贫数据建模,而神经网络对非线性系统具有良好的控制效果。将BP-GM用于激光测风雷达原理样机中,试验结果表明, 该算法能有效地降低残差值,提高风廓线数据控制的精度。
-
1982年提出的灰色理论是通过累加原始数据系列,形成单调上升的线性或指数型的序列,通过拟合值找出规律,克服数据的随机性[10]。
获取数据样本X(0)={X(0)(1), X(0)(2), …, X(0)(n)},原始数据满足条件X(0)(i)≥0, (i=1, 2, …, n)。使用此数据样本建立GM(1, 1)模型[11]。根据数据样本累加生成序列X(1)={X(1)(1), X(1)(2), …, X(1)(n)},其中,$ {X^{(1)}}\left( i \right) = \sum\limits_1^i {{X^{(0)}}} (i)$。此累加序列的白化方程为$ \frac{{{\rm{d}}{\mathit{\boldsymbol{X}}^{(1)}}}}{{dn}} + a{\mathit{\boldsymbol{X}}^{(1)}} = b $,a为发展灰数,b为内生控制灰数[12]。
根据白化微分方程写成矩阵:
$ \mathit{\boldsymbol{A}} = \mathit{\boldsymbol{B}}a' $
(1) 式中,a′为a的演化值。
$ \mathit{\boldsymbol{B = }}\left[ {\begin{array}{*{20}{c}} { - {Z^{(1)}}(2)}&1\\ { - {Z^{(1)}}(3)}&1\\ \vdots&\vdots \\ { - {Z^{(1)}}(n)}&1 \end{array}} \right], \mathit{\boldsymbol{A = }}\left[ {\begin{array}{*{20}{c}} {{X^{(0)}}(2)}\\ {{X^{(0)}}(3)}\\ {{X^{(0)}}(4)}\\ \vdots \\ {{X^{(0)}}(n)} \end{array}} \right] $
(2) $ {Z^{(1)}}\left( k \right) = \frac{{\left[ {{X^{\left( 1 \right)}}\left( k \right) + {X^{\left( 1 \right)}}\left( {k - 1} \right)} \right]}}{2} $
(3) 根据最小二乘法,估计原始数据的拟合值:
$ \begin{array}{c} {X^{(0)}}'\left( {i + 1} \right) = (1 - {e^a}) \times \\ \left[ {\left( {{X^{(0)}}\left( 1 \right) - \frac{b}{a}} \right)} \right]{e^{ - ai}} \end{array} $
(4) 式中,e为误差。建立模型之后对其精度进行检验。
残差是原始数值与拟合数值的差:
$ {e^{(0)}}\left( i \right) = {X^{(0)}}\left( i \right) - {X^{(0)}}'(i) $
(5) 后验差比值C是残差方差Se2和数据方差SX2之比:
$ C = \frac{{{S_e}^2}}{{{S_X}^2}} $
(6) ${S_e}^2 = \frac{1}{n}\sum\limits_{i = 1}^n {{{[{e^{(0)}}\left( i \right) - \bar e]}^2}} $
(7) $ {S_X}^2 = \frac{1}{n}\sum\limits_{k = 1}^n {{{[{X^{(1)}}\left( k \right) - \bar X]}^2}} $
(8) 式中,e为误差的期望值, X为输入序列的期望值[13]。可以明显看出,残差方差越小,控制精度越高。数值大小与原始样本的数值有关,为了标准化,故而使用后验差比值。
灰色模型需要的控制数据量较少,样本分布可以是随机性的、计算简便,结果较准确。灰色算法是使用拟合的思想解白化方程来进行数据控制,其计算值具有单调性,对于具有波动性和随机性的风场数据而言,不能简单地满足单一的函数条件,因此控制数据结果并不理想。
-
BP神经网路是一种监督式的学习方法[14],根据输入的样本使用反向传播的思想对网络的权值、阈值和误差不断进行训练,使输出向量在误差允许范围内尽可能的接近期望向量,并保存网络权值和阈值。
神经网络训练过程如下。
(1) 初始化神经网络。输入集合X=(X1, X2, …, Xn),输出集合Y=(Y1, Y2, …, Ym), 隐层节点数为k, 输入层节点数为n, 输出层节点数为m, 初始化神经元之间的连接权值[15],输入层与隐层和隐层与输出层的连接权值分别为vih和who, 初始化隐层阈值和输出层阈值分别为ah和bo,初始化学习速率和神经元激励函数。
(2) 隐层输出。根据输入集合X和输入隐层的权值vih以及隐层阈值ah, 得出隐层的输出计算公式:
$ {P_h} = f\left( {\sum\limits_{i = 1}^n {{v_{ih}}{X_i} - {a_h}} } \right) $
(9) 式中,f为隐层激励函数[16];h=1, 2, …, k;i=1, 2, …, n。
(3) 输出层输出。根据Ph和隐层与输出层的权值who以及输出层的阈值bo, 得出输出层的输出计算公式:
$ {Q_o} = \sum\limits_{h = 1}^k {{w_{ho}}{P_h} - {b_o}} $
(10) 式中,o=1, 2, …, m;h=1, 2, …, k。
(4) 计算误差。根据预测输出量Qo和期望输出量Yo得出误差计算公式:
$ {e_o} = {Y_o} - {Q_o} $
(11) (5) 权值更新。根据网络预测的误差向量eo更新输入层与隐层、隐层与输出层之间权值vih和who:
$ \begin{array}{c} {v_{ih}} = {v_{ih}} + \theta {P_h}\left( {1 - {P_h}} \right){\rm{ }}{X_i}\sum\limits_{o = 1}^m {{w_{ho}}{e_o}} , \\ (i = 1, 2, \cdots , n;h = 1, 2, \cdots , k) \end{array} $
(12) $ \begin{array}{c} {w_{ho}} = {w_{ho}} + \theta {P_h}{e_o}, \\ (h = 1, 2, \cdots , k;o = 1, 2, \cdots , m) \end{array} $
(13) 式中,θ为学习速率。
(6) 阈值更新。根据误差向量eo更新输入层与隐层、隐层与输出层之间的阈值:
$ \begin{array}{c} {a_h} = {a_h} + \theta {P_h}(1 - {P_h})\sum\limits_{o = 1}^m {{w_{ho}}{e_o}} , \\ \left( {h = 1, 2, \cdots , k} \right) \end{array} $
(14) $ {b_o} = {b_o} + {e_o}, \left( {o = 1, 2, \cdots , m} \right) $
(15) 根据网络允许的最大误差判断算法迭代是否结束,否则继续更新隐层输出和阈值。
BP神经网络是常用的非线性拟合工具,具有广泛的适应能力、学习能力和映射能力。通过对历史的风场数据学习,网络能从无规律性的数据中获取各自的依存关系。BP神经网络也存在局部极小和收敛慢的问题,其运算参量和结构参量要根据经验来选择,缺乏理论上的指导。
-
优化数据控制算法的本质是求解残差函数的最小值问题[17]。灰色算法对贫数据具有良好计算控制能力,但是灰色算法对平滑度不够的数据集的残差通常会不能满足需求[18]。BP神经网络算法对非线性的数据有着强大的学习能力,理论上3层BP神经网络就能拟合任意的函数,但神经网络需要大量的数据进行训练才能保持原数据的特性,而且数据量不够时神经网络的误差也会很大[19]。为了使用这两种算法的优势,弥补各自的不足,现使用BP神经网络对灰色算法残差的多次修正[20-23],最终更新灰色算法的拟合值。
灰色理论与BP神经网络融合的风廓线控制算法过程如下。
(1) 获取数据样本,使用灰色算法预处理数据,计算残差集e(0)(i)。原始时间数据集X(0)(i),原数据的预拟合值X(0)′(i),则残差集为:
$ {e^{(0)}}\left( i \right) = {X^{(0)}}\left( i \right) - {X^{(0)}}'(i) $
(16) (2) 使用BP神经网络训练残差集。以残差集e(0)(i)作为BP神经网络的输入值训练网络,理想的残差为0,之后使用训练后的各权值和阈值对残差进行数据调整,得到调整后的残差集e(0)′(i)。
(3) 通过e(0)′(i)修正灰色算法中的值,得到XBP-GM(0)(i),其计算公式为:
$ {X_{{\rm{BP - GM}}}}^{(0)}\left( i \right) = {e^{(0)}}'\left( i \right) + {X^{(0)}}'\left( i \right) $
(17) (4) 为了尽可能地降低残差,使用修正后的值, 获取残差集eBP-GM(0)(i):
$ {e_{{\rm{BP - GM}}}}^{(0)}\left( i \right) = {X^{(0)}}\left( i \right) - {X_{{\rm{BP - GM}}}}^{(0)'}(i) $
(18) 通过神经网络训练eBP-GM(0)(i),理想的eBP-GM(0)(i)对应的输出量是元素为0的集合。使用训练好的网络残差eBP-GM(0)′(i),最后更新出灰色算法的值:
$ {X_{{\rm{BP - GM}}}}^{{{(0)}'}}\left( i \right) = {e_{{\rm{BP - GM}}}}^{{{(0)}'}}\left( i \right) + {X_{{\rm{BP - GM}}}}^{(0)'}\left( i \right) $
(19) 灰色算法的残差是无规律性的,使用BP神经网络强大的学习、适应能力能有效地获取残差值的依存关系。两次使用BP修正,使得灰色算法的残差值能得到有效的控制,但是BP训练花费的时间比较长,两次使用BP也会增加残差的训练时间,整个灰色预测时间变得更长。
-
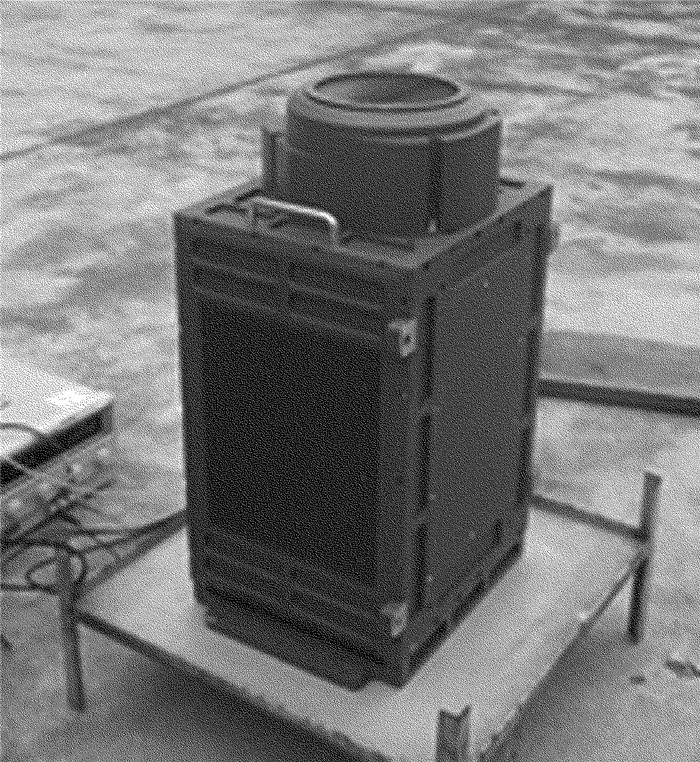
试验中采用研制的激光测风雷达原理样机,雷达系统自动化操作管理中心频率为160MHz,预留信号处理带宽60MHz,发射脉冲激光重频10kHz,脉宽200ns,单脉冲能量约60μJ,以采样率400MHz/14bit的高速采集卡对回波信号进行采集,使用1024点进行快速傅里叶变换,同时使用开发的回波信号处理算法对采集信号进行谱积累处理。雷达测风实验于2015-03-11下午在成都某楼顶进行,气温8℃,相对湿度60%,水平能见度约5km,垂直能见度约3km,实验场景如图 1所示。

Figure 1. Portable lidar
采用实时监测的风廓线数据进行分析。分别采用GM(1, 1), BP神经网络和BP神经网络修正GM残差模型实验,计算了的风廓线控制数据的相对误差、精度及后验差及小概率误差。在高度75m~2025m的67道数据以及时间段15:02:28~15:03:37的25道数据形成的67×25的数据矩阵计算GM模型、BP模型和GM-BP模型的相关属性。在此时间段使用原水平风速计算的GM, BP和BP-GM平均相对误差。通过GM和BP-GM计算获取的风廓线数据控制的效果图。
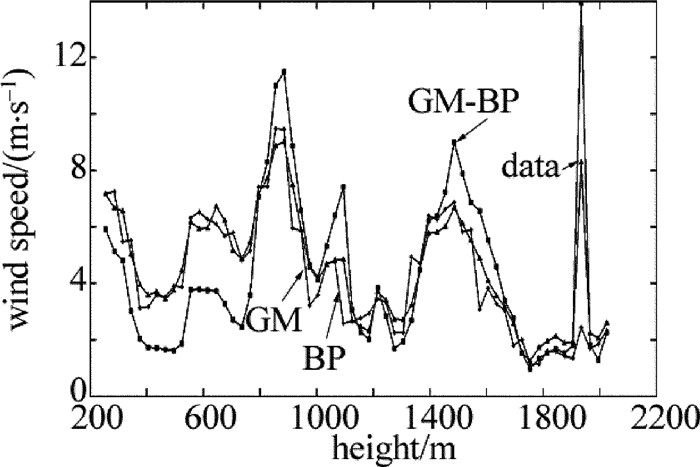
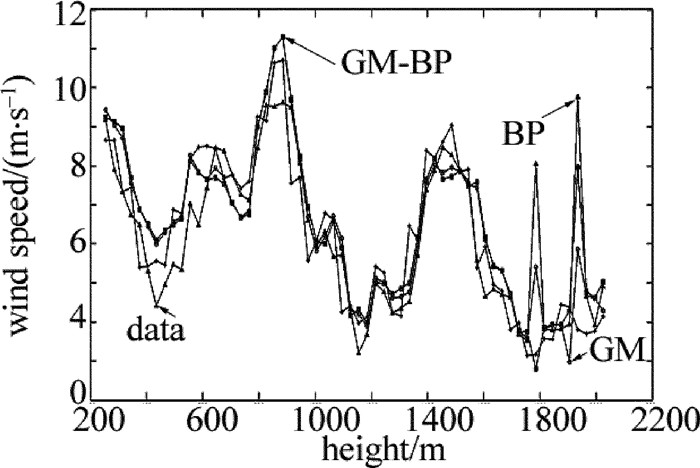
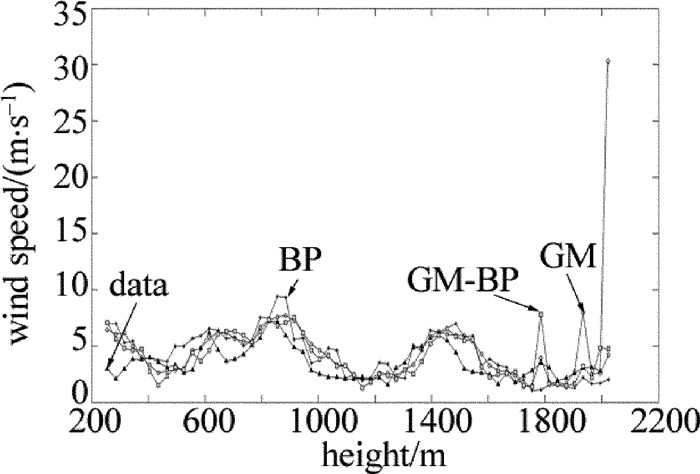
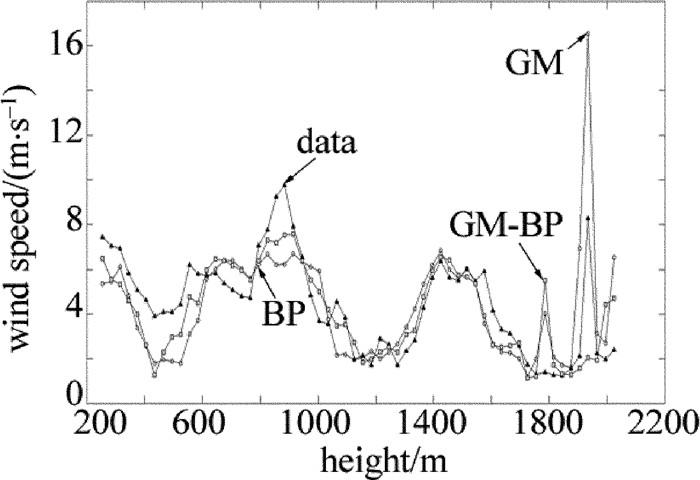
图 2~图 5中分别给出了特定时刻的风速控制效果。从图中可以看出,3种算法的控制值基本上符合原始数据值。为了详细说明这3种算法的效果,分别计算了残差值、后验差值以及精度值。
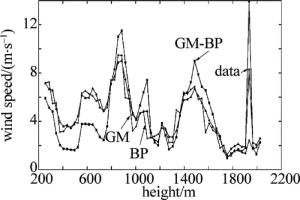
Figure 2. Wind profile control data in 15:02:28

Figure 3. Wind profile control data in 15:02:34
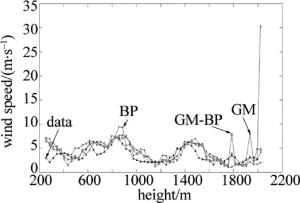
Figure 4. Wind profile control data in 15:02:50
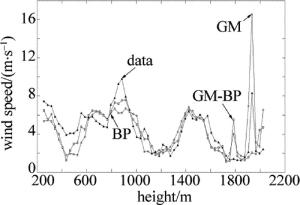
Figure 5. Wind profile control data in 15:03:13
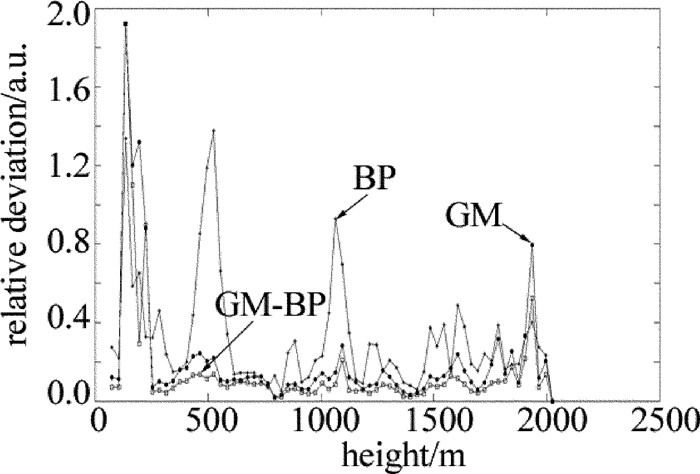
图 6中,3条曲线分别是水平风速在15:02:28~15:03:37时间段的3种控制算法平均相对误差值在高度上的变化情况。相对误差值越小,质量控制的效果越好。在75m~200m处存在奇异点,误差值波动大。从图中可以看到GM-BP控制的误差最小,几乎接近于0。

Figure 6. Relationship between average deviation and height
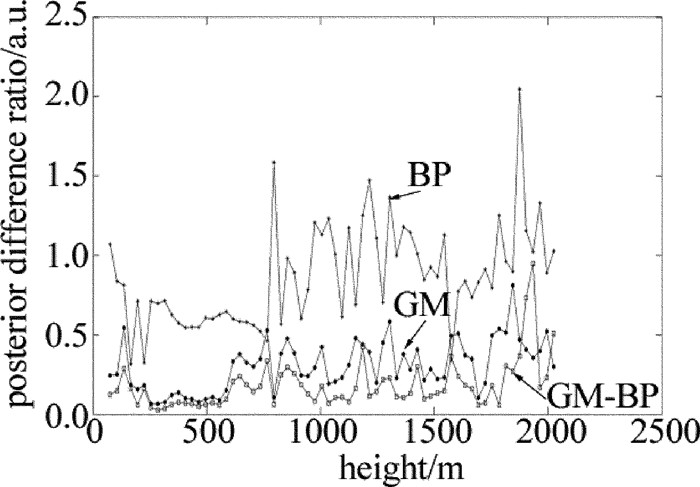
图 7中,3条曲线分别是水平风速在15:02:28~15:03:37时间段的3种控制算法的后验差比值在高度上的变化情况。后验差比值反应数据控制的有效情况,比值越小,控制效果越好。GM-BP算法的后验差比值是在1以内的,相对另外两条曲线而言,在高度上的值也是最小的。
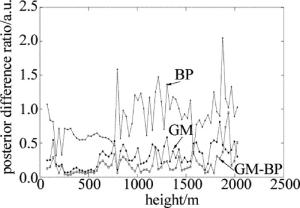
Figure 7. Relationship between posterior difference ratio and height
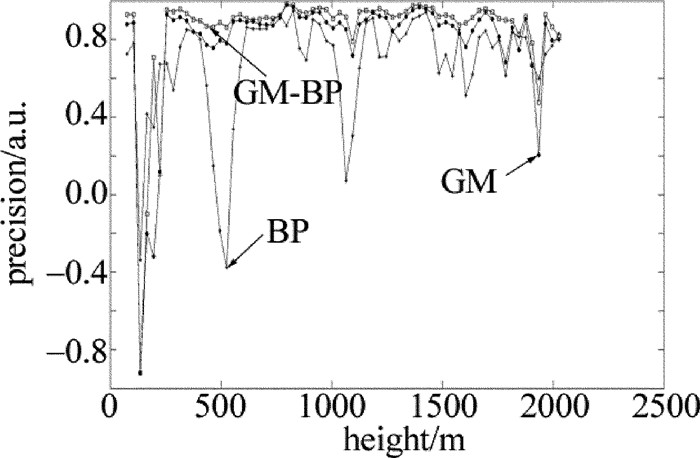
图 8中这3条曲线分别是水平风速在15:02:28~15:03:37时间段的3种控制算法的精度在高度上的变化情况。精度越接近1则反应控制效果越好。GM,BP和GM-BP这3种算法的精度基本上能保持在0.9左右,且在高度上GM-BP的精度是最稳定最接近1的。综合可知,平均相对误差、后验差比值和精度这3个验证质量控制效果的指标都体现了GM-BP对分廓线数据的质量控制效果是最好的。

Figure 8. Relationship between precision and height
-
使用BP神经网络修正灰色算法中的残差对雷达风廓线数据质量控制的研究。比较了GM(1, 1)算法、BP神经网络算法和BP-GM算法的数据控制效果。通过实时监测的风廓线数据进行计算分析,从风羽图效果来看,BP-GM算法更符合原始数据的风羽图,根据平均误差值、后验差比值及精度曲线也反映了BP-GM算法质量控制的优越性。试验数据表明, 使用BP-GM算法能有效地降低残差值,提高数据控制精度。BP-GM算法中使用多次BP神经网络修正灰色残差必然会造成计算耗时较多的情况,这也是该方法的最大不足之处。在后期工作还需要找到能快速训练神经网络以减少计算耗时的方法,以提高算法效率。
基于修正灰色残差算法的风廓线质量控制
Wind profile quality control based on modified grey residual algorithm
-
摘要: 为了研究时间域上风廓线数据的质量控制问题,采用后向传播神经网络修正灰色算法残差的方法(BP-GM),进行了理论分析和实验验证。使用反向传播神经网络训练历史风廓线数据的灰色残差,取得了风廓线质量控制数据。结果表明,当相对误差和后验差比值越小、精度越接近1时,质量控制效果越好;BP-GM法能有效地降低风廓线数据控制残差,提高精度。这一结果对风廓线质量控制是有帮助的。Abstract: In order to study quality control problem of wind profile data in time domain, a method of neural network was used to correct residual error of grey algorithm. Back propagation neural network was used to train grey residual error of historical wind profile data, and the quality control data of wind profile was obtained. After theoretical analysis and experimental verification, the results show that the algorithm can effectively reduce residual error and improve the accuracy of wind profile data. The result is helpful for quality control of wind profile.
-
Key words:
- laser technique /
- quality control /
- back propogation neural network /
- grey method
-
-

 点击查看大图
点击查看大图
图(8)
计量
- 文章访问数: 3191
- HTML全文浏览量: 1820
- PDF下载量: 256
- 被引次数: 0
