 网站地图
网站地图



-
相干多普勒激光测风雷达是近年来发展起来的一种新型大气风场探测仪器,能够连续、实时、准确地获取大气风场数据,具有测量精度高、实时性强等优点。不仅能对大气风场信息进行实时测量,还能实时监测大气中的云层运动分布、风切变、湍流以及飞行器产生的漩涡等各种可能造成破坏性后果的风场信息,对气象观测、机场、港口、风力发电、人工影响天气等各种受大气风场直接影响的场合具有重要作用。
由于大气环境的复杂性及地形、太阳辐射、闪电等多种因素影响,大气中存在急流、风切变等威胁飞机安全的气象现象。飞机尾流、机场跑道上空的风切变等紊流场对飞机的起降影响巨大。低空风切变是航空界公认的飞机在起飞和着陆阶段的“杀手”。由于其发生突然、时间短、尺度小、强度大,非常难以预测预报[1]。当质量较大的飞行器遇到低空风切变时,容易因飞行高度低、机动空间小而产生事故。因此,国内外科研领域均致力于激光测风雷达技术的深度应用研究,为军用及民用飞行器提供飞行安全保障。
目前,洛克希德马丁公司所研制的Wind Tracer激光测风雷达已经在多个国际机场投入使用[2]。法国Leo sphere公司所研制的Wind Cube激光测风雷达也在国际市场中占有较大份额[3]。同时,日本三菱公司所研制的多款激光测风雷达[4-5]以及英国Halo-Photonics[6]在激光测风雷达研制及应用方面也有很大进步。在国内,从事相干激光测风雷达的研究单位主要有中国科学院上海光学精密机械研究所[7]、哈尔滨工程大学[8-12]、中国海洋大学[13]及作者所在单位[14-16]等。虽然国内从事激光雷达研究起步较晚,但进展十分迅速。
本文中介绍了一款自主研制的小型3维激光测风雷达。该雷达采用2维扫描球结构形式,能够实现对上半球空域大气风场的覆盖测量,并具有风廓线探测、扫描探测等多种功能模式。设备体积小、精度高、测程远,可用于机场及气象台站等场所,为飞行器起降提供空中风场信息支持。
-
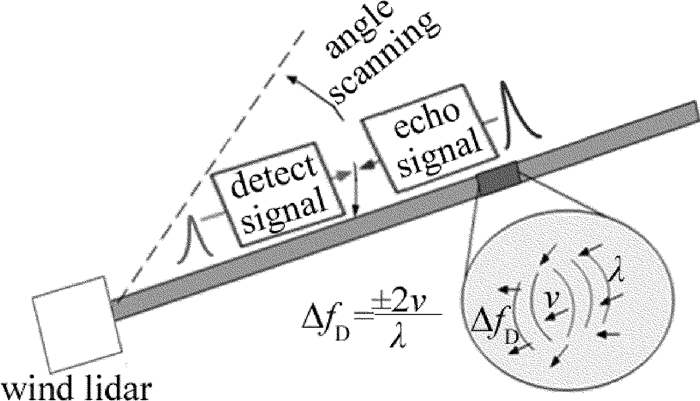
激光多普勒测风雷达的工作原理是通过监测大气气溶胶粒子对激光散射回波所携带的多普勒频移信息,测出大气风场的结构分布。激光视线方向的风速与多普勒频移存在着固定关系:
$ \Delta {f_{\rm{D}}} = \pm 2v/\lambda $
(1) 式中,ΔfD为多普勒频移,v为粒子沿光束方向的径向速度,λ为激光波长。其物理过程如图 1所示。
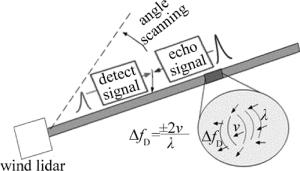
Figure 1. The process of lidar detection
雷达利用稳频激光作为照射光束,探测大气中漂移的气溶胶粒子的散射回波信号,并与雷达本振光进行相干混频,通过中频信号的数字鉴频技术来获得气溶胶粒子相对激光束的多普勒频移,再结合雷达的光机扫描,最终实现3维风场测量。
如图 2所示,激光测风雷达由窄线宽种子激光器输出的线偏振激光经光纤预放大器进行预放大后,再经光纤分束器一分为二:一路作为本振信号光;另一路光经声光调制器(acousto-optical modulators, AOM)声光移频及脉冲调制后变为高重频的激光脉冲,再到脉冲光纤放大器中进行能量放大,得到高能量的激光脉冲。
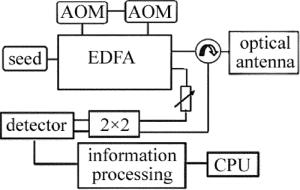
Figure 2. The operating principle of lidar
激光脉冲经光学环行器后,由光学收发天线发射进入空中。激光束与大气气溶胶粒子作用后,后向散射回波信号通过收发天线收集,再经过光学环行器耦合进入光纤合束器,与本振光进行相干混频。相干混频光由平衡光电探测器转换为电中频信号, 经放大后送入高速信息处理机中,按照距离门进行时序划分,并对每个距离门数据进行快速傅里叶变换(fast Fourier transform,FFT),以及多脉冲频谱累加等处理,最后计算出每个距离门内的径向风速、信噪比等参量。上述测量数据通过雷达中控机整理后,送入上位显示控制计算机中进行风场反演处理。在此基础上,进一步对风场结构进行综合分析,可获得风切变等二次数据产品。
-
传统的微波风廓线雷达采用电子相控阵波束控制方式,一般采用三波束或五波束的多普勒光束摆动(Dopplor beam swinging, DBS)扫描方式来进行风场反演,其中波束为垂直方向,用于对垂直气流进行直接测量。但对于激光测风雷达,由于元器件发展水平限制,现阶段在工程应用上还无法通过光学相控方式来实现波束指向的变化,国内外均采用光机扫描方式来实现多波束的变换,并通过多波束的反演得到高精度的风速风向信息。
针对现有3维激光测风雷达的工作情况,为了准确快速地测量低空风场的风廓线信息。作者提出了雷达四波束扫描工作方式,并建立四波束风场反演模型,对相应的测量精度进行了分析与仿真计算。
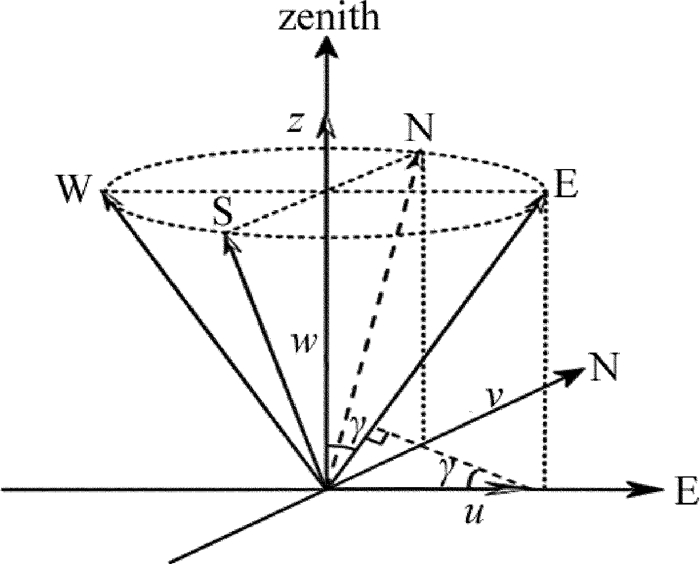
四波束DBS扫描过程中,假设风场矢量保持不变,如图 3所示。设风矢量为(u,v,w),在雷达直角坐标系中:u沿着x轴,v沿着y轴,w沿着z轴(垂直气流),圆锥扫描半角γ是激光束指向与z正轴的夹角,扫描方位角θ以x坐标正轴为0°起点。

Figure 3. The theory of DBS scanning
每个径向风速vr与风向矢量的关系可表示如下:
$ {v_{\rm{r}}} = u{\rm{cos}}\theta {\rm{sin}}\gamma + v{\rm{sin}}\theta {\rm{sin}}\gamma + w{\rm{cos}}\gamma $
(2) 根据参考文献[16]可知:
$ \left\{ \begin{array}{l} u = \frac{{{v_{{\rm{r, E}}}} - {v_{{\rm{r, W}}}}}}{{{\rm{2sin}}\gamma }}\\ v = \frac{{{v_{{\rm{r, N}}}} - {v_{{\rm{r, S}}}}}}{{2{\rm{sin}}\gamma }}\\ w = \frac{{{v_{{\rm{r, E}}}} + {v_{{\rm{r, N}}}} + {v_{{\rm{r, W}}}} + {v_{{\rm{r, S}}}}}}{{4{\rm{cos}}\gamma }} \end{array} \right. $
(3) 式中,vr, E,vr, N,vr, W和vr, S分别为径向风速vr在E, N, W, S这4个方向上的分量;vh为真实风速;a为风向,经计算可得:
$ \left\{ \begin{array}{l} {v_{\rm{h}}} = \sqrt {{u^2} + {v^2}} \\ a = {\rm{arctan}}(v/u) \end{array} \right. $
(4) 四波束反演的水平风速风向误差分别为:
$ \left\{ \begin{array}{l} \Delta {v_{\rm{h}}} = \frac{{\Delta {v_{\rm{r}}}}}{{\sqrt 2 {\rm{sin}}\gamma }}\\ \Delta a = \frac{{\Delta {v_{\rm{h}}}}}{{{v_{\rm{h}}}}} = \frac{{\sqrt 2 }}{{\sqrt {{{({v_{{\rm{r, E}}}} - {v_{{\rm{r, W}}}})}^2} + {{({v_{{\rm{r, N}}}} - {v_{{\rm{r, S}}}})}^2}} }} \end{array} \right. $
(5) 式中,Δvr为雷达单波束径向风速测量误差,该值与雷达采集系统精度、激光线宽、调制精度等均有关系,对于本雷达系统,Δvr=0.15m/s。根据DBS风场反演模型,结合风速(4)式、风向误差(5)式, 可得风速、风向误差与四波束扫描夹角γ的关系, 如表 1所示。
Table 1. The relationship among lidar's wind profile scanning angle, wind speed and direction
γ/
(°)wind
velocity
error/
(m·s-1)wind direction error/(°) (5~10)
m/s(10~20)
m/s(20~30)
m/s(30~40)
m/s(50~60)
m/s10 0.61 7.01 3.50 1.75 1.17 0.70 15 0.41 4.70 2.35 1.18 0.78 0.47 20 0.31 3.56 1.78 0.89 0.59 0.36 25 0.25 2.88 1.44 0.72 0.48 0.29 30 0.21 2.43 1.22 0.61 0.41 0.24 从表 1中可以看出,扫描夹角γ越大,风速风向精度越高;风速越大,风向精度也越高。但在雷达实际安装环境下,扫描夹角受诸多条件限制(周边环境的影响以及测量高度的要求等)。此外,雷达存在波束被遮挡的可能,其原因主要包括固定建筑物的遮挡,以及飞鸟等空中目标的偶然遮挡等。因此,雷达的四波束风场扫描的扫描夹角需根据实际情况进行选取,并应考虑在某波束受遮挡情况下的风场扫描反演方法。
-
目前国内外成熟的3维激光测风雷达的扫描均采用二轴转镜方式,雷达的光学收发系统固定,激光束通过二轴扫描头的转动,实现对激光束的扫描控制。该方式的优点是结构简单、价格低;缺点是光束经过多个反射镜片的反射,导致扫描头的光路调校复杂,并影响系统光学效率。
为了提高系统光学效率,并实现雷达的紧凑小型化,作者所设计的激光测风雷达抛弃了传统的设计方式,创新地采用2维扫描球工作方式,将激光测风雷达装在2维光电扫描球内,通过球体的纵向俯仰及横向方位旋转扫描,实现激光雷达对所需方位的大气风矢量的测量, 测量所得各个方位的径向风矢量数据通过上位机的风场反演计算,获得对测量空域的风场数据。该结构的优点在于雷达光学收发为一个整体,不需要复杂的光学扫描,系统效率得到较大的提高,且系统整体体积得到较大降低。
3维激光多普勒测风雷达由雷达主机及上位机组成。如图 4所示。主机中的光学扫描头包括激光模块、光学天线模块及相干探测接收模块等,该光学扫描头具有纵向俯仰与横向方位旋转功能,可带动光电组件转动实现对上半球空域的扫描覆盖。底座电子舱含系统电源模块、扫描控制模块、温控模块及中央控制模块等。上位机完成对雷达主机的控制、风场数据反演、二次产品生成及相关显示、存储等功能,雷达主机与上位显示控制计算机通过以太网连接。主要参量见表 2。
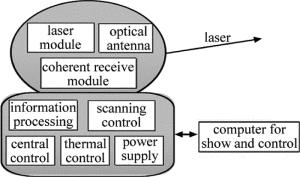
Figure 4. The schematic diagram of 3-D wind lidar
Table 2. The main parameters of 3-D wind lidar
parameters numerical value working wavelength 1550nm detection range 45m~3km range resolution 30m/50m/75m/100m angular resolution 0.1° scan range(azimuth/pitch) 0°~360°/0°~90° scanning mode DBS/PPI/RHI/CAPPI accuracy of wind speed 0.2m/s(radial), 0.5m/s accuracy of wind direction 5° wind speed range -60m/s~+60m/s power consumption of lidar 200W(24V, DC) -
气溶胶是大气中的悬浮颗粒物质的总称,其尺寸在微米量级,与激光波长相当。气溶胶主要包括硫酸盐气溶胶、沙尘气溶胶、黑炭气溶胶、有机碳气溶胶及海洋气溶胶等,其浓度分布随地区及季节变换。由于3维激光测风雷达以大气中随风飘逸的气溶胶粒子为示踪物,因此雷达性能受气溶胶的影响较大,在不同地区或时段其测量范围会存在一定的变化。此外,激光测风雷达受天气现象的影响同样较大,如雨雪冰雹云及沙尘等天气状况会对激光束产生散射及吸收,从而对测量性能产生一定的影响。
根据相干激光测风雷达方程,要实现对距离为R的大气目标测量,雷达系统所需的激光输出能量为:
$ {E_{\rm{t}}} = \frac{{8hB{R^2}}}{{{\rm{ \mathsf{ π} }}\eta \beta \lambda {T_{{\rm{opt}}}}{D^2}\sqrt M }}{\rm{exp}}(2\alpha R) $
(8) 式中, Et为激光发射模块的输出能量;h为普朗克常量;B为系统带宽;Topt为光学效率;D为天线有效口径,取为100mm;M为脉冲累加次数;η为光学传输效率;λ为激光波长,取为1550nm;α为大气散射消光系数;β为大气后向散射系数。
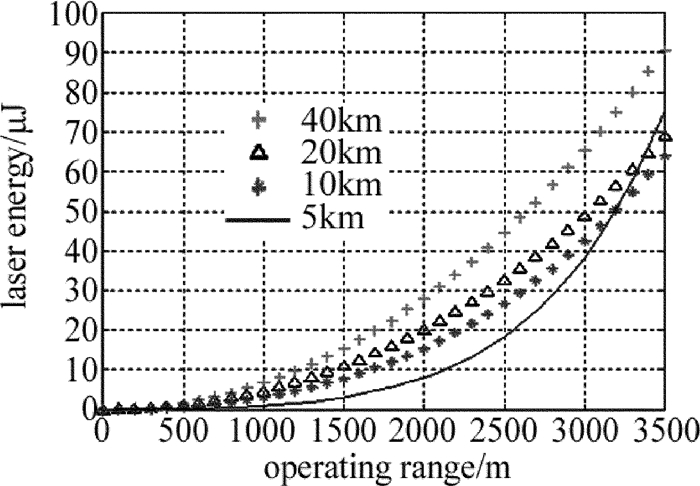
因此,根据雷达公式,可以计算出针对不同水平气象能见度条件下,3维激光测风雷达对激光发射能量的需求情况,如图 5所示。
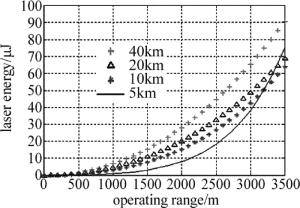
Figure 5. The relationship between laser energy and operating range at diffe-rent visibilities
从图中可以看出,发射脉冲能量为100μJ的情况下,能见度5km~40km条件下可实现大于3km的水平探测距离。
-
3维激光测风雷达包括多种工作模式,系统可通过编程实现一种或多种模式的工作。其中风廓线探测模式(DBS模式)及扫描探测模式为系统的两种重要工作模式。前者用以测量雷达正上方各高度层的风速、风向及垂直气流等;后者包括平面位置显示(plan position indicator, PPI)、距离高度显示(range height indicator, RHI)及等高平面位置显示(constant altitude plan position indicator, CAPPI)等多种扫描方式,完成对指定空域凤场的全方位测量。
2015年6月至9月,该3维激光测风雷达在东北某沿海地区进行了测风试验,并与微波风廓线雷达、双经纬仪测风仪、探空气球等多种手段进行了试验比对。
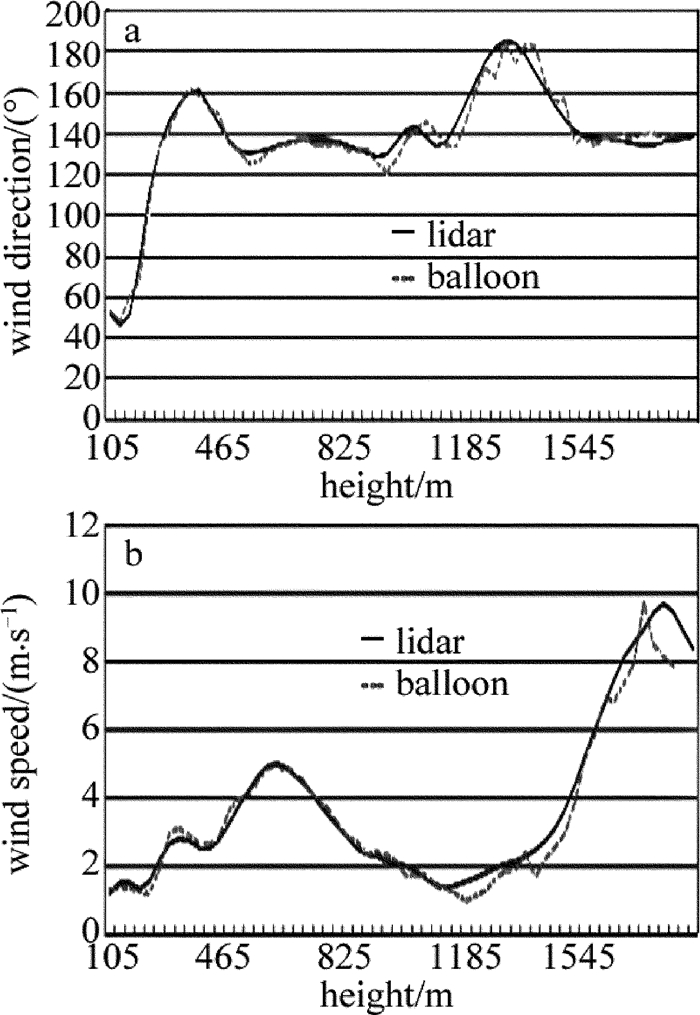
图 6为某次雷达与双经纬仪测风仪进行比对试验的风速风向比对结果曲线图。图中实线为雷达测风数据(采用每2min一次的数据平均),所采用的双经纬测风仪第1个输出高度为100m,为与激光测风雷达进行对比,对数据进行高度层插值处理,每间隔30m输出一组数据。雷达的第1个高度取105m,高度分辨率为30m。从图 6中可以看出,雷达与经纬仪测风的风速风向数据曲线吻合良好,若以双经纬测风仪的测量结果为基准,则可计算出激光测风雷达的风速均方根误差为0.42m/s,风向均方根误差为5.33°。
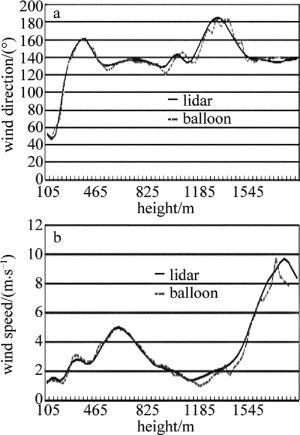
Figure 6. The relationship of wind direction, wind speed and height measured by wind lidar and theodolite balloons
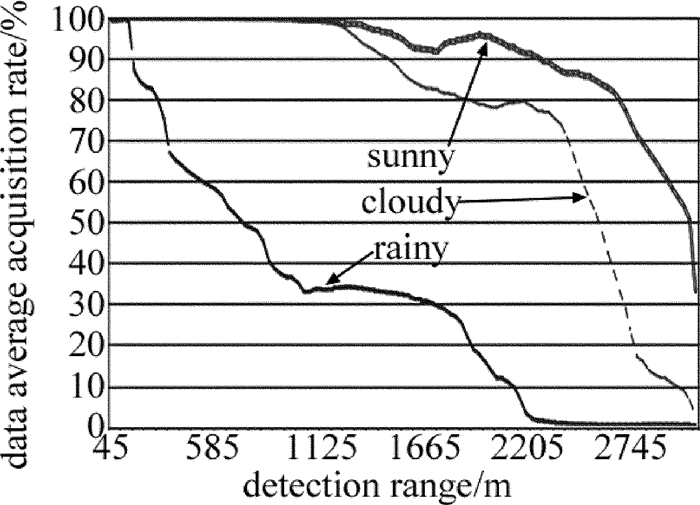
为进一步分析激光测风雷达在不同天气情况下的测量能力,将该时间段的测量结果数据大致按照晴天、阴天及雨天3种天气状况来分别统计雷达的数据获取率。数据获取率越高,说明雷达在该种天气条件下的测量能力越强。
图 7为雷达处于风廓线模式下不同天气情况下的数据获取率曲线。雷达输出数据采用每2min(约有30组瞬时数据)一次的数据平均。由于沿海地区气溶胶呈多种形态分布,气溶胶浓度随高度升高而逐渐降低,且受天气状况影响较大。从图中可以看出,在晴天及阴天情况下,雷达对2000m高度范围内的气溶胶均能实现有效探测,超过2500m高度后,在晴天情况下,气溶胶浓度有明显的降低趋势;而在阴天情况下,气溶胶浓度分布在2000m~3000m高度范围内缓慢降低。对于雨天及雾天情况,由于雨雾对激光的较强吸收,导致雷达的数据有效率下降非常快,到700m高度左右的数据有效率降低到约60%。从试验现象来看,大雨及浓雾情况下,水气浓度较大,对测量能力影响非常大,而中雨及小雨情况下,雷达受雨的影响逐渐减弱。
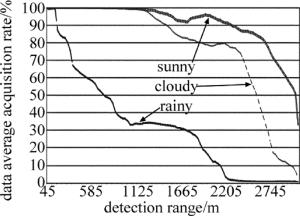
Figure 7. Average data acquisition rate of 3-D wind lidarunder different weather conditions
-
所研制的紧凑型3维激光相干测风雷达创新性地采用2维扫描球结构,通过光电扫描转台在水平及俯仰方向进行光机扫描,实现了雷达对上半球空域大气3维风场的测量。经长期试验比对,结果表明:该激光测风雷达可对2.5km高度及3.0km斜程范围内的大气风场进行有效探测。该激光测风雷达具有数据精度高、稳定性好、在晴天及阴天的天气状况下数据获取率高等优点。该3维激光测风雷达可用于气象台站或机场等场所,可对中低空大气风场进行有效测量,并且能对测量点周边空域的大气风场分布进行探测分析,可实现飞行器起降通道的风场测量及风切变监测预警等功能。
3维激光测风雷达技术研究
Technical research of 3-D wind lidar
-
摘要: 为了精确测量3维大气风场的实时状态以应对低空风切变在飞行器起降过程中给飞行器带来的多种问题,通过DBS四波束风场反演原理研制出一款小型3维激光测风雷达。对大气风场展开测风试验并获取风场数据,并与其它标准测风设备的数据对比分析。结果表明,雷达在晴天和阴天的天气状况下均可以实现对大气风场的有效测量,风速均方根误差0.42m/s,风向均方根误差5.33°。该雷达精准度高、稳定性好,对风切变预警、中低空大气风场预报及飞行器飞行通道的风场测量具有重要作用。Abstract: In order to accurately measure the 3-D real-time atmospheric wind field to cope with the problems of low-level wind shear during aircraft take-off and landing, a compact 3-D Doppler wind lidar was developed by using Doppler beam swinging (DBS) principle. The wind field data obtained by the lidar were compared with the anemometry data with the other standard equipments. It turned out that the effective measurement of atmospheric wind field was achieved by the lidar under both sunny and cloudy weather conditions. The root mean square errors of wind speed and wind direction were 0.42m/s and 5.33° respectively. The lidar, with high precision and good stability, plays an important role for wind shear warning, the forecast of low-level atmospheric wind field and wind field measurement of aircraft flight channel.
-
Key words:
- laser technique /
- wind lidar /
- 3-D scanning /
- coherent detection /
- Doppler /
- contrast of wind field
-
Figure 5. The relationship between laser energy and operating range at diffe-rent visibilities
Figure 6. The relationship of wind direction, wind speed and height measured by wind lidar and theodolite balloons
Figure 7. Average data acquisition rate of 3-D wind lidarunder different weather conditions
Table 1. The relationship among lidar's wind profile scanning angle, wind speed and direction
γ/
(°)wind
velocity
error/
(m·s-1)wind direction error/(°) (5~10)
m/s(10~20)
m/s(20~30)
m/s(30~40)
m/s(50~60)
m/s10 0.61 7.01 3.50 1.75 1.17 0.70 15 0.41 4.70 2.35 1.18 0.78 0.47 20 0.31 3.56 1.78 0.89 0.59 0.36 25 0.25 2.88 1.44 0.72 0.48 0.29 30 0.21 2.43 1.22 0.61 0.41 0.24  下载: 导出CSV
下载: 导出CSV
Table 2. The main parameters of 3-D wind lidar
parameters numerical value working wavelength 1550nm detection range 45m~3km range resolution 30m/50m/75m/100m angular resolution 0.1° scan range(azimuth/pitch) 0°~360°/0°~90° scanning mode DBS/PPI/RHI/CAPPI accuracy of wind speed 0.2m/s(radial), 0.5m/s accuracy of wind direction 5° wind speed range -60m/s~+60m/s power consumption of lidar 200W(24V, DC)
下载: 导出CSV
-
[1] WANG Q M, GUO L L. Development of lidar in detection of low altitude wind shear[J].Laser & Infrared, 2012, 42(12):1324-1328(in Chinese). [2] SHUN Ch M, LAU S Y. Implementation of a doppler light detection and ranging(lidar) system for the hong kong international airport[C]//International Civil Aviation Organization 10th Conference on Aviation, Range and Aerospace Meteorology of the American Meteorological Society(AMS). Montreal, Canada: International Civil Aviation Organization, 2002: CNS/MET SG/8-IP/3. [3] CARIOU J P, CANAT G. Fiber lasers:new effective sources for coherent lidars[J]. Proceedings of the SPIE, 2007, 6750:675007. doi: 10.1117/12.741584 [4] ASAKA K, YANAGISAWA T, HIRANO Y. 1.5μm eye-safe cohe-rent lidar system for wind velocity measurement[J]. Proceedings of the SPIE, 2001, 4153:321-328. doi: 10.1117/12.417063 [5] ODA R, IWAI H, MURAYAMA Y, et al. Doppler lidar observations of the coherent structures in the internal boundary layer[C]//American Meteorological Society (AMS) Ninth Symposium on the Urban Environment. New York, USA: American Meteorological Society (AMS), 2010: 10.1. [6] PEARSON G N, EACOCK J R. Fiber-based coherent pulsed Doppler lidar for atmospheric monitoring[J]. Proceedings of the SPIE, 2002, 4484:51-57 doi: 10.1117/12.452799 [7] ZHU X P, LIU J W, DIAO W F, et al. Study of coherent Doppler lidar system[J]. Infrared, 2012, 33(2):8-12(in Chinese). [8] LI Y C, WANG C H, QU Y, et al. Numerical investigation of multi-beam laser heterodyne measurement with ultra-precis ion for linear expansion coefficient[J]. Chinese Physics, 2011, B20(1):014208. [9] LI Y C, WANG C H. A method of measuring micro-impulse with torsion pendulum based on multi-beam laser heterodyne[J]. Chinese Physics, 2012, B21(2):020701. [10] LI Y C, YANG Y L, XIA X S, et al. The method for dual-beam laser heterodyne ultra-precision measurement of the glass thickness[J]. Acta Physica Sinica, 2009, 58(8):5473-5478(in Chinese). [11] LI Y C, GAO L, CONG H F, et al. Optimum optical local oscillator power leves impact on signal-to-noise ratio in heterodyne[C]//IEEE International Symposium on Photonics and Optoelectronics(SOPO 2010). New York, USA: IEEE, 2010: 1-3. [12] LI Y C, WANG C H, GAO L, et al. Design and experimenta l investigation of a 2.05μm single mode fiber coupler with high coupling efficiency[C]//IEEE 2010 ASOMT & 10th CRST. New York, USA: IEEE, 2010: 217-220. [13] LIU Zh Sh, CHEN Zh, YU C R, et al. Doppler wind lidar:from vehicle-mounted to space-borne[J]. Journal of Atmospheric and Environmental Optics, 2015, 10(2):126-138(in Chinese). [14] CHEN Y, ZHOU B Zh, TAN J, et al. Research and application of airborne laser Doppler wind lidars[J].Laser Technology, 2011, 35(6):795-799(in Chinese). [15] FENG L T, GUO H Q, CHEN Y, et al. Experiment of all fiber Doppler lidar at 1.55μm[J]. Infrared and Laser Engineering, 2011, 40(5):844-847(in Chinese). [16] LI C, LIU J W, ZHAO P E, et al. Correction method of tilt wind field of mobile wind lidar[J]. Laser Technology, 2017, 41(3):385-390(in Chinese). -

 点击查看大图
点击查看大图
图(7) / 表(2)
计量
- 文章访问数: 9948
- HTML全文浏览量: 7837
- PDF下载量: 289
- 被引次数: 0
