 网站地图
网站地图


-
边界层内的大气温度变化,对解释地球温暖化现象、太阳辐射、提高气象预报准确度等具有重要的意义[1]。边界层内的温度由于受地表辐射的影响,变化复杂,经常产生逆温层。另外,边界层的逆温结构常会抑制近地面污染物的扩散,导致逆温层下污染物的集聚。因此,对边界层内大气温度的有效监测显得尤为重要。目前常用的手段有激光雷达探测、气球探空以及卫星反演。激光雷达在探测精度和空间分辨率上的优势以及可以连续测量等特点使其越来越受到科技人员的重视[2]。
目前由于气溶胶的影响以及探测机制本身的原因,不同的激光雷达在探测大气温度时有着不同的探测空间限制。钠共振荧光激光雷达只适合探测80km~ 110km范围空间内大气温度[3-4],瑞利散射激光雷达只能探测30km~80km范围空间的大气温度[5],振动喇曼激光雷达适合探测10km~30km范围内的空间大气温度[6]。纯转动喇曼激光雷达可以比较好地消除气溶胶的影响,适合用于对流层特别是边界层的大气温度的测量[7-8]。转动喇曼激光雷达通常根据大气中氮分子和氧分子的转动喇曼散射回波信号比来反演大气温度[8]。MAO等人采用355nm作为探测激光波长大气对边界层的温度进行测量,单脉冲激光能量约为300mJ,累积脉冲数约10000发,接收望远镜直径250mm,采用一块光栅和两片干涉滤光片来提取转动喇曼信号,夜晚2km处测量精度达到1K[9]。日本的IMAKI等人采用355nm作为探测激光波长,单脉冲激光能量约为200mJ,累积脉冲数约20000发,接收望远镜直径250mm,采用一块光栅和两片干涉滤光片来提取转动喇曼信号,白天2.5km处夜晚4.6km处测量精度达到1K[10]。德国的HAMMANN等人采用355nm作为探测激光波长,单脉冲激光能量约为200mJ,累积脉冲数约55000发,接收望远镜直径400mm,采用干涉滤光片多色仪来提取转动喇曼信号,晴朗天气白天4.5km夜晚6.6km处测量精度达到1K,有云的天气白天2.1km夜晚3.2km处测量精度达到1K[11]。
本文中采用双光栅单色仪来分光,介绍了转动喇曼激光雷达的总体结构和探测原理,模拟计算了该雷达的探测能力,实验测量了边界层内大气温度的垂直廓线,在2.5km信号起伏带来的统计误差达到1K。
-
纯转动喇曼激光雷达的系统结构如图 1所示。该系统采用Nd: YAG固体激光的二倍频光波长532nm作为探测光,经过扩束器扩束准直后,单脉冲能量约100mJ, 重复频率为10Hz,光束发散角0.3mrad, 有导光镜导向大气。激光与大气中的氮分子和氧分子发生散射,后向散射光由直径200mm的牛顿望远镜接收, 接收视场为0.2mrad,激光发射和接收信号属于同轴系统,雷达的盲区约为300m。光纤将望远镜接收的回波信号导向双光栅单色仪,此单色仪有两块光栅、两个透镜和两块焦板组成,第1块光栅将中心波长分别为529.0nm, 530.3nm, 533.8nm, 535.1nm的谱线分开,然后对米-瑞利散射信号进行一次剔除,第2块光栅将中心波长为529.0nm和535.1nm的两组谱线求和以及中心波长为530.3nm和533.8nm的两组谱线求和,同时对米-瑞利散射信号进行二次剔除。最后由光电倍增管(photo multiplier tube, PMT)将光信号转换成电信号输出,经前置放大器放大后送到瞬态记录仪和计算机,对信号进行采集和处理。此激光雷达所采用的系统参量如表 1所示。

Figure 1. Structure of rotational Raman lidar system
Table 1. Basic parameters of rotational Raman lidar
system parameter value Nd:YAG wavelength 532nm pulse energy 100mJ pulse repetition frequency 10Hz receiver diameter 200mm field of view 200μrad gratings diffraction order 5 grating constant 600g/mm lens focal length 200mm input fiber core diameter 0.6mm output fiber core diameter 1.3mm PMT Hamamatsu/R7400U-03 amplifier Phillips 6954 transient recorder Licel vertical resolution 7.5m -
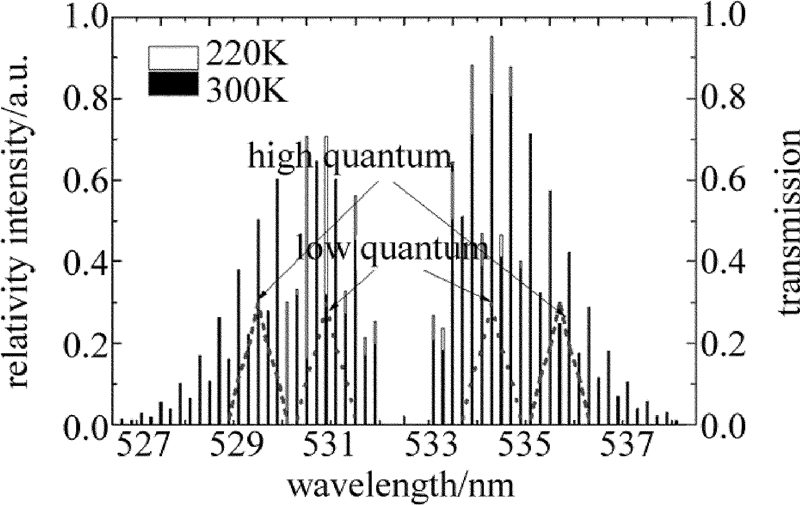
根据转动喇曼谱的强度公式[12-13],计算了氮气在不同温度的谱线的相对强度以及双光栅单色仪的透过率曲线, 如图 2所示。随着温度升高,低量子数的转动喇曼谱线强度减小,高量子数的转动喇曼谱线的强度增强。透过率曲线的中心波长分别为529.0nm, 530.3nm, 533.8nm, 535.1nm,透过率约为30%,带宽约为0.4nm。转动Raman散射回波信号高低量子数强度比满足指数关系[14]:
$ R\left( z \right) = {N_{\rm{l}}}\left( z \right)/{N_{\rm{h}}}(z) = {\rm{exp}}[a/T\left( z \right) - b] $
(1) 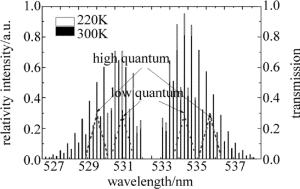
Figure 2. Transmissivity curves of N2 by rotation Raman spectrum and double grating monochromator at different temperatures
由此指数关系可以反演出大气温度:
$ T\left( z \right) = a/\{ {\rm{ln}}[{N_{\rm{l}}}\left( z \right)/{N_{\rm{h}}}\left( z \right)] - b\} $
(2) 式中, Nl,Nh是对应高低量子数的后向散射回波光子数; a,b为系统常数,可通过激光雷达测的回波信号比和探空仪测的大气温度拟合出。
-
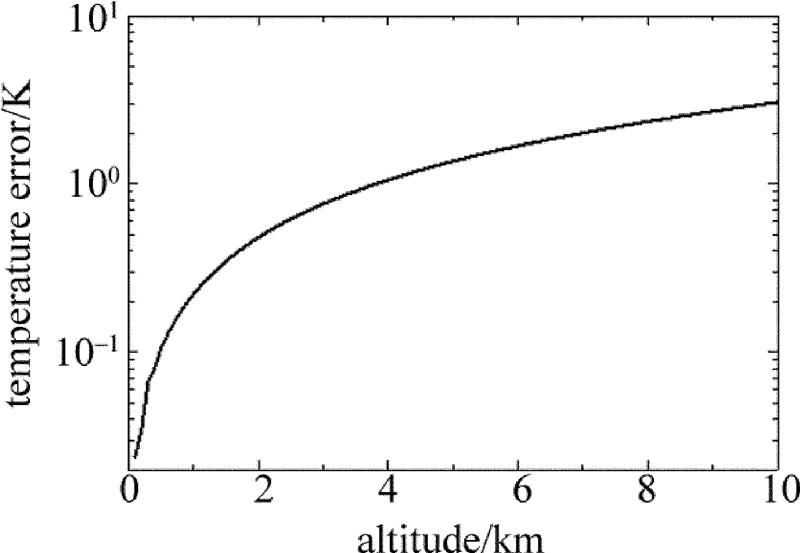
为了研制测量边界层大气温度的转动喇曼雷达,首先对这个系统的测量精度进行了模拟计算,大气温度反演的误差是由灵敏度和信噪比共同来决定的[15-16],由(1)式可推导出温度反演的灵敏度为。信噪比是由回波信号的光子数、背景光和光电探测器的暗计数决定的, 光子计数法中,信噪比定义为:RSNR(z)=[(Nl+Nd)/Nl2+(Nh+Nd)/Nh2]-1/2,其中Nd为探测器的暗电流噪声, 可表示为Nd=nd·Δt,nd是探测器的暗计数(500s-1),Δt为时间分辨率,则系统的温度测量误差为。取测量时间为17min,高度分辨率为150m,其余参量如表 1所示。模拟计算得到的温度误差随探测高度的变化曲线如图 3所示。可以看出,随着高度的增加,测量误差越来越大,在3.8km处温度测量精度可达到1K。模拟计算结果为该激光雷达的系统参量的选择和探测性能提供了理论参考。
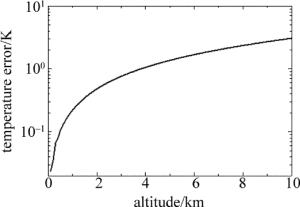
Figure 3. The variation of the simulated temperature error with height
-
测量结果部分给出了实验中采集到的回波信号,大气温度的反演结果,以及大气温度的测量精度。温度误差由(2)式及误差传播理论可得到[17]:
$ \Delta T = T\left\{ {{{\left( {\frac{{\Delta a}}{a}} \right)}^2} + {\rm{ }}{{\left[ {\frac{{\Delta b}}{{{\rm{ln}}({N_{\rm{l}}}/{N_{\rm{h}}}) - b}}} \right]}^2} + \frac{{{{(\Delta {N_{\rm{l}}}/{N_{\rm{l}}})}^2} + {{(\Delta {N_{\rm{h}}}/{N_{\rm{h}}})}^2}}}{{{{[{\rm{ln}}({N_{\rm{l}}}/{N_{\rm{h}}}) - b]}^2}}}} \right\}{^{1/2}} $
(3) 温度误差与回波信号、定标常数a, b有关,定标常数带来的误差见参考文献[17]。如果只考虑回波信号起伏带来的误差,则(3)式可简化为:
$ \Delta T = T\sqrt {{{[{{(\Delta {N_{\rm{l}}}/{N_{\rm{l}}})}^2} + {{(\Delta {N_{\rm{h}}}/{N_{\rm{h}}})}^2}\left] / \right[{\rm{ln}}({N_{\rm{l}}}/{N_{\rm{h}}}) - b]}^2}} $
(4) 在光子计数法中,大气回波信号,大气背景及光电倍增管光子计数服从泊松分布,在测量中累计信号的相对不确定度可表示为ΔN/N=1/N (N为累积光子计数量)。因此信号起伏带来的温度统计误差为:
$ \Delta T = \frac{T}{{{\rm{ln}}({N_{\rm{l}}}/{N_{\rm{h}}}) - b}}\sqrt {\frac{1}{{{N_{\rm{l}}}}} + \frac{1}{{{N_{\rm{h}}}}}} {\rm{}} $
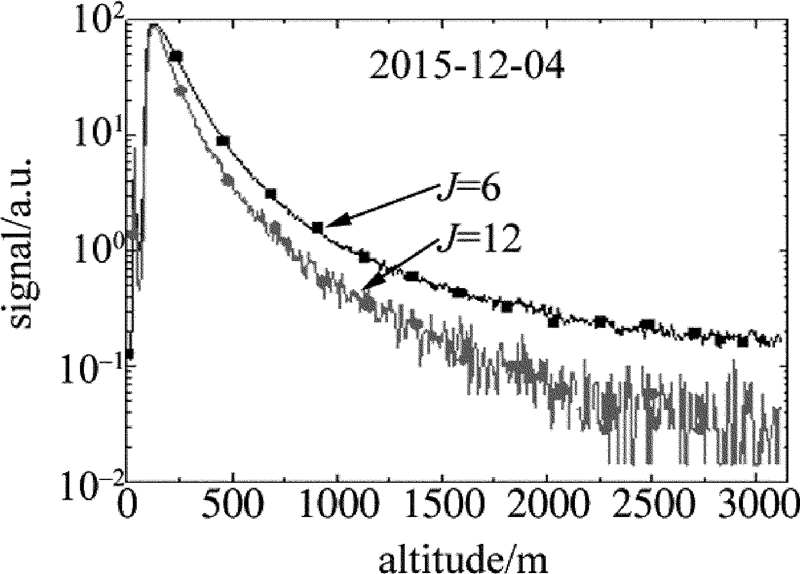
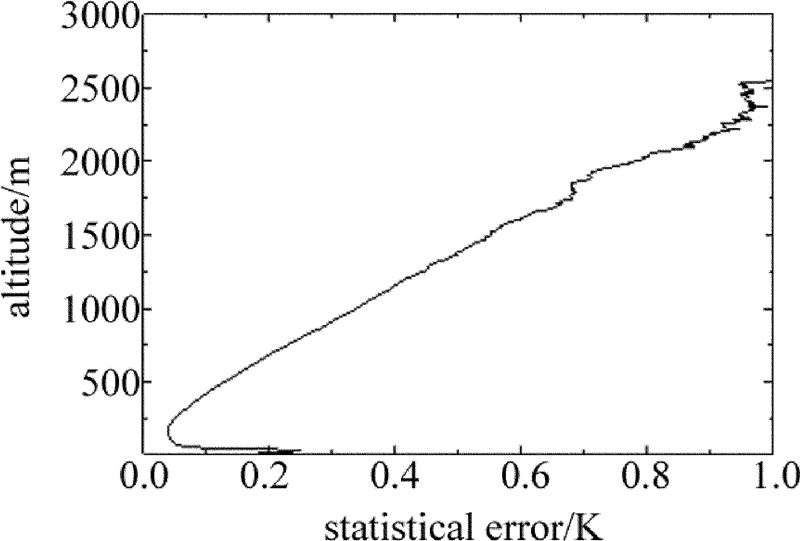
(5) 为了证实测量边界层大气温度的转动喇曼激光雷达系统的可行性,2015-12-04晚上在合肥某地使用该雷达进行了边界层大气温度观测。数据采集系统采用的是德国Licel的瞬态记录仪,分辨率为7.5m, 约17min累加统计一组结果,间隔5min进行下一组采集, 回波信号如图 4所示。图 4中,J为转动量子数。可以看出有效信号至2km,2.5km以上高度基本上为背景噪声。信号的垂直分辨率是7.5m,为了减小信号的随机起伏,通过权重平滑法平滑到150m。从图 5中可以看出,边界层温度随高度升高而递减较快,雷达测量的大气温度和大气模式表现了较好的一致性。0.5km以下激光雷达测量的结果偏小,可能是因为两个通道的几何重叠因子不同,以及混入了少量气溶胶导致的。2.5km以上激光雷达测量的温度的不确定性较大,是因为信噪比的下降而导致的。从图 6中可以看出,在2.5km处统计温度误差达到1K。这表明该激光雷达观测的温度分布是可靠的。测量结果比模拟结果差一些,可能是因为光路还没有调整到最佳,大气模式与真实的大气温度分布存在差异,模拟计算用的双光栅单色仪的透过率函数与实际存在差异,系统的光学透过率比实际大等等。在后续的实验中,要使测量高度进一步增大,可以增加发射激光脉冲的能量、选用口径大的望远镜或用探空气球来定标。
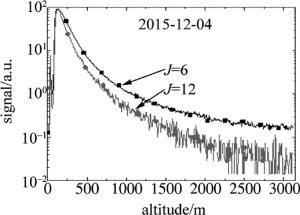
Figure 4. Echo signal of the rotational raman lidar
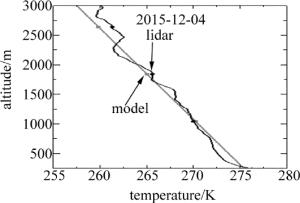
Figure 5. Temperature profile of the rotational raman lidar
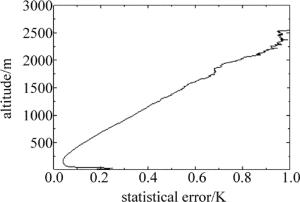
Figure 6. Temperature error
-
为了研究边界层内的大气温度,一个转动喇曼雷达系统已经被搭建起来,由双光栅单色仪来提取高低量子数两组转动喇曼信号。经过初步的研究,激光能量100mJ,平均脉冲数10000发,在2.5km信号起伏带来的统计误差达到1K,在2.5km以下雷达和大气模式表现了较好的一致性。如果要使测量的高度升高,可以增加激光脉冲的能量、选用口径大的望远镜或用探空气球来定标。大气边界层的高度是气象和环境部门研究的重点内容、也是表征大气边界层的一个重要参量,然而大气边界层的高度确与大气垂直减温率有关,因此探测边界层大气温度的转动喇曼激光雷达有着广阔的应用前景。
探测边界层大气温度的转动喇曼激光雷达
Rotational Raman lidar for detecting temperature profiles in boundary layer
-
摘要: 为了研制一种测量边界层大气温度的激光雷达,采用氮气和氧气的转动喇曼谱的强度比反演大气温度垂直分布的方法,对转动喇曼激光雷达系统进行了理论分析与实验研究,取得了边界层内的大气温度数据。结果表明,该激光雷达测量的大气温度在0km~2.5km处与大气模式表现出了较好的一致性,激光能量为100mJ,测量时间约为17min,垂直分辨率为7.5m;2.5km处信号随机起伏引起的统计误差达到1K,可以对边界层内2.5km以下的大气温度进行高精度测量;如果要使测量的高度进一步增加,可以增大激光脉冲的能量或选用口径大的望远镜。这对探测边界层大气温度的转动喇曼激光雷达系统的研制提供了有益的指导。Abstract: In order to develop a lidar to measure temperature profiles in the planetary boundary layer, the vertical distribution of atmospheric temperature was retrieved based on the ratio of the rotational Raman spectrum intensity of nitrogen and oxygen. After theoretical analysis and experimental research of rotational Raman lidar system, the atmospheric temperature data in the boundary layer were obtained.The results show that, the atmospheric temperature measured by the lidar is in good agreement with atmospheric model in the range of 0km to 2.5km. The statistical error caused by random fluctuation of signal at 2.5km reaches 1K under the conditions of laser energy of 100mJ, measurement time of about 17min and vertical resolution of 7.5m. The atmospheric temperature below 2.5km within the boundary layer can be measured with high accuracy. The increase of laser pulse energy or the select of the telescope with large caliber would improve the height of the measurement further. The study provides the favorable guidance for development of rotational Raman lidar systems for detecting atmosphere temperature in boundary layer.
-
Figure 2. Transmissivity curves of N2 by rotation Raman spectrum and double grating monochromator at different temperatures
Table 1. Basic parameters of rotational Raman lidar
system parameter value Nd:YAG wavelength 532nm pulse energy 100mJ pulse repetition frequency 10Hz receiver diameter 200mm field of view 200μrad gratings diffraction order 5 grating constant 600g/mm lens focal length 200mm input fiber core diameter 0.6mm output fiber core diameter 1.3mm PMT Hamamatsu/R7400U-03 amplifier Phillips 6954 transient recorder Licel vertical resolution 7.5m  下载: 导出CSV
下载: 导出CSV
-
[1] YAN J X, GONG Sh Sh, LIU Zh Sh.Lidar for environment monitoring[M].Beijing:Science Press, 2001:135-140(in Chinese). [2] ZHUANG Z B, HUANG W, FU Ch, et al. Portable visibility detector based on backward scattering lidar[J]. Laser Technology, 2015, 39(1):46-49(in Chinese). [3] ALPERS M, EIXMANN R, FRICKEBEGEMANN C, et al. Temperature lidar measurements from 1 to 105km altitude using resonance, Rayleigh, and rotational Raman scattering[J]. Atmospheric Chemistry & Physics, 2004, 4(1):923-938. [4] SHE C Y, YU H R. Simultaneous three frequency Na lidar measurements of radial wind and temperature in the mesopause region[J]. Geophysical Research Letters, 1994, 21(17):1771-1774. doi: 10.1029/94GL01417 [5] CHEN W N, TSAO C C, NEE J B. Rayleigh lidar temperature measurements in the upper troposphere and lower stratosphere[J]. Journal of Atmospheric and Solar-Terrestrial Physics, 2004, 66(1):39-49. doi: 10.1016/j.jastp.2003.09.014 [6] LI B, HUA D X, ZHOU Y, et al. The synthetical multilevel quality analysis and control technique for the Raman lidar detecting temperature[J]. Acta Optica Sinica, 2017, 37(4):0428003(in Chinese). doi: 10.3788/AOS [7] SU J, ZHANG Y Ch, HU Sh X, et al. Raman lidar measuring tropospheric temperature profiles with many rotational Raman lines[J]. Spectroscopy and Spectral Analysis, 2008, 28(8):1781-1785(in Chinese). [8] CHEN S Y, QIU Z J, ZHANG Y C, et al. A pure rotational Raman lidar using double-grating monochromator for temperature profile detection[J]. Journal of Quantitative Spectroscopy & Radiative Transfer, 2011, 112(2):304-309. [9] MAO J D, XIE Zh, WU M, et al. Ultraviolet rotational Raman lidar for high accuracy temperature profiling of the planetary boundary layer[J]. Proceedings of the SPIE, 2008, 7130:1-6. [10] IMAKI M, KAWAI H, KATO T, et al. Efficient ultraviolet rotational raman lidar for temperature profiling of the planetary boundary layer[J]. Japanese Journal of Applied Physics, 2012, 51(5):052401. [11] HAMMANN E, BEHRENDT A, MOUNIER F L, et al. Temperature profiling of the atmospheric boundary layer with rotational Raman lidar during the HD(CP)2 observational prototype experiment[J]. Atmospheric Chemistry & Physics, 2015, 15(5):2867-2881. [12] LIU Y L, SUN Y Sh, CHEN L L, et al. Algorithm of double grating monochromator transmittance function of rotational Raman radar[J]. Laser Technology, 2016, 40(4):491-495(in Chinese). [13] ZHONG Sh, YI F, ZHANG Sh D.A new method for inversion of atmospheric temperature and aerosol backscatter coefficient using pure rotational Raman spectrum[J].Chinese Journal of Geophysics, 2012, 55(11):3527-3533(in Chinese). [14] JIA J Y, YI F. Atmospheric temperature measurements at altitudes of 5-30km with a double-grating based pure rotational Raman lidar[J]. Applied Optics, 2014, 53(24):5330-5343. doi: 10.1364/AO.53.005330 [15] LIU J, HUA D X, LI Y. Rotational Raman lidar for daytime-temperature profiling of the atmospheric boundary layer[J]. Acta Optica Sinica, 2007, 27(5):755-759(in Chinese). [16] MAO J D, ZHAO H, SHENG H J, et al. A novel spectroscopicfilter used in rotational Raman lidar for the temperature of profiling[J]. Journal of Russian Laser Research, 2013, 34(2):129-138. doi: 10.1007/s10946-013-9333-z [17] LIU Y L, XIE Ch B, SHANG Zh, et al. Retrieval and analysis of atmospheric temperature using a rotational Raman lidar observation[J].Spectroscopy and Spectral Snalysis, 2016, 36(6):1978-1986. -

 点击查看大图
点击查看大图

图(6) / 表(1)
计量
- 文章访问数: 7062
- HTML全文浏览量: 5301
- PDF下载量: 266
- 被引次数: 0
