 网站地图
网站地图










-
近年来,3维地面激光扫描(terrestrial laser scanning, TLS)技术已成为快速获取地物3维信息的重要手段,并广泛应用于农业[1]、林业[2]、变形监测[3]、建筑物提取[4]、文化遗产保护[5]等领域,极大地推动了大规模激光扫描数据3维场景分析的发展。由于原始点云为无序、离散的3维数据,需要通过后处理转换为语义信息,才能为不同领域提供可以直观理解与应用的专业信息,这个过程称为点云分类。
特征提取是点云分类的重要环节,常用的点云特征包括几何特征[6]、RGB颜色特征[7]、强度特征[8]。并非所有点云数据都包含RGB颜色、强度信息,使得根据这两种特征进行分类的应用范围受限,因此本文中主要使用几何特征进行分类。几何特征通常根据点云坐标进行计算,是最常用的特征类型,依赖于局部结构和点密度[9]。作为影响几何特征的主要因素之一,点密度变化对地面激光扫描数据的影响要高于机载和车载激光扫描两种数据形式[10]。在大范围地面激光扫描数据分类中,点密度会随扫描距离的增大而减小,因此,点密度变化往往是几何特征提取需要考虑的重要影响因素。
许多学者利用点密度变化实现了特定地物类型的识别。CHE等人基于点密度和角分辨率模拟参考点密度,提出用于TLS数据地面滤波的相对密度[11]。水平投影密度的差异可以直接反映地物的几何特征,SHI等人将点云投影到水平格网,统计子格网的投影点数量并将其作为投影点密度(density of projected points, DoPP),将DoPP高于预定义阈值的点标记为建筑物立面[12];此外,利用水平格网的DoPP可以实现单木提取[13]。但是投影点密度会随距离增大而减小,使得大范围激光扫描数据难以设置统一阈值提取地物。为了解决这个问题,CHENG等人以建筑物轮廓为研究对象,根据最远建筑物到扫描仪的距离、最低建筑物的高度和角分辨率计算DoPP自适应阈值[14];LIU等人使用扫描距离和角分辨率等参数计算每个格网的自适应阈值,实现对不同距离动态车辆的提取[15]。除特定地物类别的提取外,在完整场景分类中通过搜索最优邻域[9, 16]或提取多尺度特征[17-18]来避免点云密度变化对特征尺度不一致的影响,但对于单点搜索范围或特定尺度的选择仍然依赖于先验知识。点云密度自适应处理仍是解决此类问题的有效方式,CHEN等人根据点密度、扫描距离和角分辨率设置密度自适应搜索范围,实现森林场景中的树干点提取[19];在此研究的基础上,CHEN等人又在城市场景中对相关方法进行改进,根据角分辨率和扫描距离估计点间距,基于不同的点间距设计密度自适应邻域,使用极坐标格网代替常用的格网以适应密度变化,提高了远距离建筑物的提取精度[20]。但是在使用极坐标格网计算点云密度时,格网面积会随着扫描距离的增大而增大,距离扫描中心较远的格网可能会包含多种地物类型,从而影响最终分类结果。
上述顾及密度变化的特征提取方法可以提高分类精度,但是仍然存在一些亟待解决的问题。例如,在利用点密度变化进行地物提取的方法中,很多密度自适应方法是针对某一类特定地物进行设计,在完整场景分类中仍然缺少顾及密度变化的特征设计;在利用点密度变化进行密度自适应处理的研究中,角分辨率作为点密度的重要影响因素,也是相关密度自适应算法的必要参数,但是目前大部分点云密度自适应后处理方法都假定其为已知参数带入计算[20],很多地面激光扫描公共数据集,包括Semantic-3D[21]、Wuhan University TLS(WHU-TLS)[22]在内的点云数据通常不提供角分辨率参数,使得上述密度自适应方法受到限制。为了解决完整场景分类中的点密度变化问题和角分辨率未知的限制,本文作者面向角分辨率未知的地面激光点云数据,提出一种使用随机邻域分析的角分辨率估算方法;在此基础上,改进点密度计算方法,结合角分辨率提出顾及密度变化的网格特征提取方法,用于大规模地面激光点云分类。
-
本文中所提方法主要包括4个步骤:地面滤波、角分辨率估算、特征提取、点云分类,如图 1所示。首先,使用布料模拟滤波(cloth simulation filter, CSF)[23]剔除地面点;其次,利用非地面点的水平角和竖直角估算角分辨率;然后,基于最优邻域计算点云几何特征,改进点密度计算方法;最后,基于随机森林进行点云分类并评估特征重要性。
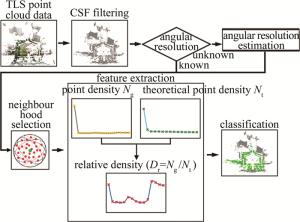
图 1 工作流程
Figure 1. Workflow of our method
-
在TLS中,激光束从一个中心以固定的角度间隔发射,这个角度间隔称为角分辨。角分辨率作为点密度变化影响因素之一,通常作为点密度自适应处理的已知参数代入算法,较少考虑角分辨率未知的情况。面向角分辨未知的地面激光点云数据,本文中使用随机邻域分析进行角分辨率的估算。
首先使用CSF算法剔除原始数据中的地面点,在剩余的非地面点数据中随机选取一定数量的中心点,搜索每个中心点的k个最邻近点,由单点坐标反算得到每个中心点pi及邻域点pij对应的水平角和竖直角,并计算两者对应激光束在水平和竖直方向的角度间隔Δθij和Δαij:
$ \theta=\left\{\begin{array}{l} \arccos \left(x / \sqrt{x^2+y^2}\right), (y \geqslant 0) \\ 2 \mathsf{π}-\arccos \left(x / \sqrt{x^2+y^2}\right), (y<0) \end{array}\right. $
(1) $ \left\{\begin{array}{l} \alpha=\arcsin \left(z / \sqrt{x^2+y^2+z^2}\right) \\ \Delta \theta_{i j}=\operatorname{abs}\left(\theta_{i j}-\theta_i\right) \\ \Delta \alpha_{i j}=\operatorname{abs}\left(\alpha_{i j}-\alpha_i\right) \end{array}\right. $
(2) 式中,θi和αi分别为中心点pi的水平角和竖直角;θij和αij分别为邻域点pij的水平角和竖直角;i=1, 2, …, n; j=1, 2, …, k。
本文中的方法以Δ为区间宽度,通过统计不同区间内的角度间隔数目和所有Δθij和Δαij的值构建直方图,如图 2所示。将统计数目由高到低位列第二的区间内角度间隔均值作为当前区间宽度Δ下的水平角分辨率θs(Δ)和竖直角分辨率αs(Δ)。

图 2 水平和竖直角间隔直方图构建与分析(Δ=0.005°)
Figure 2. Construction and analysis of horizontal and vertical angular interval histograms (Δ=0.005°)
为了降低单直方图估算和参数Δ对实验结果的影响,本文中使用不同参数Δi(Δi∈[0.005°, 0.015°],取值间隔0.001°)构建多组直方图,计算水平角分辨率θs(Δi)和竖直角分辨率αs(Δi),取其中位数作为角分辨率的最终估算结果。
$ \left\{\begin{aligned} \theta_{\mathrm{s}}= & \operatorname{median}\left(\theta_{\mathrm{s}}\left(\Delta_i\right)\right) \\ \alpha_{\mathrm{s}}= & \operatorname{median}\left(\alpha_{\mathrm{s}}\left(\Delta_i\right)\right) \\ \mathit{\Delta}_i= & 0.005+(i-1) \times 0.001, \\ & (i=1, 2, \cdots, 11) \end{aligned}\right. $
(3) 式中,θs和αs表示本文中的方法对水平角分辨率和竖直角分辨率的最终估算结果,Δi为不同区间i所对应的水平和竖直角间隔,median表示对角分辨率集合取中位数。
-
本文中使用参考文献[16]中的方法,即基于某一点的k邻域,通过逐步增加邻近点个数k(k∈[10, 100], Δk=10),获取最优邻域并计算单点几何特征。根据给定点X及其k个邻近点,构建3维协方差矩阵S3-D,使用密度D、垂直度V、维度特征Lλ, Pλ, Sλ、全方差Oλ、各向异性Aλ、曲率变化Cλ、香农熵Ed、特征熵Eλ描述点云的3维特征[9],得到3维特征向量。与3维几何特征类似,可以推导2维协方差矩阵S2-D[9]并计算2维特征:
$ \boldsymbol{F}_{\text {3-D }}=\left[L_\lambda, P_\lambda, S_\lambda, E_{\mathrm{d}}, E_\lambda, O_\lambda, A_\lambda, C_\lambda, D, V\right] $
(4) $ \boldsymbol{F}_{2-\mathrm{D}}=\left[D_{2-\mathrm{D}}, L_{\lambda, 2-\mathrm{D}}, P_{\lambda, 2-\mathrm{D}}, O_{2-\mathrm{D}}, E_{\mathrm{d}, 2-\mathrm{D}}, E_{\lambda, 2-\mathrm{D}}\right] $
(5) -
格网特征通常基于规则格网进行划分,通过分析每个格网内地物的整体特征实现特征提取。点密度作为一种重要的格网特征,通常定义为水平面(xOy)内每个格网单元的投影点数量,主要受扫描几何、目标几何、扫描分辨率、格网单元大小等因素影响。在TLS中,扫描几何是物体对象距离和角度的函数,主要取决于扫描仪位置;物体几何描述被扫描物体的形状;同一点云数据的角分辨率保持恒定;此外,不同格网单元大小也会影响局部点密度估计。在大范围TLS场景中,由于上述因素、高差以及扫描物体间相互遮挡的共同作用,格网单元内的投影点数量会随着扫描距离的增大而减少,如图 3所示,靠近扫描仪的格网通常比距离扫描仪较远的格网包含更多点,不同格网单元内相同类别的点密度差异较大,因此,直接以投影点数量作为格网密度特征可能难以区分地物类型。

图 3 点云密度变化
Figure 3. Variable of point density
为了解决点密度变化对特征提取的影响,本文中提出相对投影密度作为格网密度特征,改进点密度计算方法,替代直接以单位面积投影点数量作为密度特征的方法。相对投影密度定义为:单元格网内实际点云数目Ng与理论点云数目Nt之比,记为Dr:
$ D_{\mathrm{r}}=\frac{N_{\mathrm{g}}}{N_{\mathrm{t}}} $
(6) 角分辨率是计算理论点云数目的重要参数,常常作为扫描仪的已知参数进行获取,在角分辨率未知的情况下,使用第1.1节中所述方法:计算点云不同中心点光束及其邻域点光束的水平角和竖直角,并统计不同区间宽度下的水平角和竖直角数目,从而得到最终的角分辨率估算结果。由点云角分辨率α以及每个单元格网的角度区间β,可以得到单元格网内的理论点云数目Nt:
$ N_{\mathrm{t}}=\frac{\beta}{\alpha \times \frac{\mathsf{π}}{180^{\circ}}} $
(7) 式中,β表示扫描原点与每个单元格网4个顶点连线的最大角度差,如图 4所示。

图 4 格网角度区间
Figure 4. Angle range of sub-grid
为了分析本文中所提相对投影密度的有效性,选取实验场景中一条扫描线,该扫描线上包括近处植被与远处建筑物,如图 5a所示,分析扫描线上传统点密度、理论点密度和相对投影密度变化趋势。图 5b、图 5c分别表示传统点密度和理论点密度。格网单元密度在距离原点0.5 m时达到最大值,并随着扫描距离增加而下降,同时由于近处植被和远处建筑物的密度差异不明显,传统点密度与理论点密度难以体现地物自身几何性质。而当扫描线穿过植被与远处建筑物时,相对投影密度出现明显变化,如图 5d所示,其变化趋势与实际地物类别一致,能够准确反映真实地物的几何特征。

图 5 相关密度变化情况
Figure 5. Density variable
格网特征还包括格网内最大高差ΔZ和高程标准差σZ, 相对投影密度格网特征Fg表示为:
$ \boldsymbol{F}_{\mathrm{g}}=\left[D_{\mathrm{r}}, \Delta Z, \sigma_Z\right] $
(8) -
本实验中使用的3组点云数据如图 6所示。数据1为森林场景,数据2和数据3为城市场景。使用数据1、2、3验证角分辨率估算方法的有效性,3组数据的角分辨率均为已知参数,基本信息如表 1所示。将估算角分辨率与已知参数进行对比,计算角分辨率估算误差。使用数据2验证本文中所提相对投影密度的有效性,进行特征提取和分类实验,各类别基本信息如表 2所示。

图 6 实验数据(高程渲染)
Figure 6. Test data colored by height
表 1 实验数据信息
Table 1. Test data information
data set scanner model point number angular resolution during scanning/(°) horizontal direction vertical direction 1 Reigl-VZ400 53101629 0.02 0.02 2 Reigl-VZ500 15613009 0.038 0.038 3 STONEX X300 1876543 0.09 0.09 表 2 场景内各地物类别基本信息
Table 2. Basic information about per class of objects in the scene
class point number sample building 2279283 1000 pedestrian 625268 1000 car 133672 1000 pole 24923 1000 vegetation 3663557 1000 others 234328 1000 ground points 8652023 — total 15613009 6000 -
为了验证本文中角分辨率估算方法的有效性,将本文中的方法与参考文献[24]中基于点间距的角分辨率估算方法进行对比。本文中所提方法需要设置的参数为随机点数目n和邻域点数k,实验分别取值为500和30;在参考文献[24]中,每次手工选择水平和竖直方向上的10对邻近点,实现对角分辨率的估算。将两种角分辨率估算方法在3组数据上分别重复进行10次实验,对比运行结果的平均误差。实验结果如表 3、表 4所示。本文中所提角分辨率估算方法精度高于基于点间距的方法,在3组点云数据上的估算误差均小于0.002°,其估算误差远小于基于点间距的估算方法。
表 3 10次估算得到的水平角分辨率平均误差
Table 3. Estimated mean error of horizontal sampling interval of 10 runs on each dataset
data set our method/(°) based on point spacing/(°) 1 0.0004 0.0041 2 0.0007 0.0048 3 0.0002 0.0019 表 4 10次估算得到的竖直角分辨率平均误差
Table 4. Estimated mean error of vertical sampling interval of 10 runs on each dataset
data set our method/(°) based on point spacing/(°) 1 0.0006 0.0035 2 0.0013 0.0046 3 0.0003 0.0019 -
为了验证本文中特征提取方法的有效性,将相对投影密度特征组合与参考文献[20]中的传统密度特征组合进行对比,使用随机森林进行分类。在参考文献[20]中,为适应密度变化提出基于点云数目的特征组合,可以保证通过每个格网的激光数量相近,使得格网的点云密度分布更加均衡。本文中的方法需要设置的参数主要为格网宽度l,这里将其取值为2.5 m,此外作者还测试了不同格网宽度(l∈[0.5, 2.5], Δl=0.1)对分类结果的影响。传统密度特征组合的主要参数为角分辨率比例N和极径间隔Δr,本文中分别将其取值为10,0.5。本文中对两种特征组合方式分别重复进行100次实验。评价指标包括总体分类精度(overall accuracy, OA)、召回率、精确率、F1指数,实验结果如表 5和图 7所示。
表 5 不同特征组合的精度指标
Table 5. Accuracy indicators under different feature combinations
feature combination class F1/% recall/% precision/% OA/% relative projection density building 96.62 95.42 97.85 91.47 vegetation 93.19 88.50 98.41 car 70.92 94.50 56.78 pole 41.26 92.70 26.57 pedestrian 99.14 98.31 99.98 others 49.51 79.53 35.95 traditional density features building 93.34 90.10 96.82 88.36 vegetation 92.08 87.29 97.44 car 51.55 84.31 37.15 pole 23.13 80.26 13.52 pedestrian 97.99 96.94 99.05 others 44.12 68.50 32.56 
图 7 不同特征组合的分类结果
Figure 7. Classification results of different feature combinations
本文中基于相对投影密度格网特征组合得到的总体分类精度均值为91.47%,而传统密度特征组合下的总体分类精度均值为88.36%,本文中的方法具有更高总体分类精度。在建筑物和植物类别中,两种特征组合方式具有相似的精确率,本文中方法的召回率和F1指数精度更高。在车辆类别中,传统密度特征组合的召回率、精确率和F1指数与本文特征组合差距较大,相对投影密度特征组合召回率高于90%,精确率和F1指数比传统密度特征组合高出10%以上,表明大部分车辆可以被正确识别,如图 8所示。两种方法在杆状物类别的召回率都高于80%,但其精确率均低于30%。实验结果表明,相对投影密度特征的分类精度优于传统密度特征,在车辆、杆状物等类别精度提升更多。

图 8 车类别分类结果可视化对比
Figure 8. Visual comparison of car class classification results
-
本文中还测试了不同格网宽度l对分类精度的影响,格网宽度l∈[0.5, 2.5] m, Δl=0.1 m,对不同格网宽度l分别重复进行100次实验,分类结果如图 9所示。实验结果表明,不同格网宽度会影响分类精度。在0.5 m~2.5 m的范围内,随着格网宽度的增加,各指标的精度均有所提高,当格网宽度达到2.5 m时,总体分类精度、F1指数和召回率的精度最高,分别为91.47%,96.62%和95.42%;而精确率的最大值98.68%所对应格网宽度为1.0 m。

图 9 不同格网宽度的分类结果
Figure 9. Classification results of different grid widths
-
本文中借助随机森林实现特征重要性评估,如图 10所示。从图中可以看出,3个格网特征的重要性最高,3维、2维特征的重要性程度明显低于格网特征。基于特征值所构建的几何特征中,曲率变化Cλ的特征重要性程度最高;维度特征Lλ、Pλ、Sλ中,散乱特征Sλ重要性程度最高,2维特征中面状特征Pλ, 2-D的重要性程度最高;基于协方差矩阵归一化特征值的特征熵Eλ和Eλ, 2-D比基于维度特征的香农熵Ed和Ed, 2-D具有更高的判别性。

图 10 相对投影密度特征重要性
Figure 10. Feature importance of relative projection density
-
本文中面向角分辨率未知的数据,提出一种使用随机邻域分析的角分辨率估算方法;为解决大规模TLS数据点密度变化的问题,提出了一种相对投影密度的格网特征提取方法;最后根据点云3维坐标和角分辨率提取特征向量实现分类。实验结果表明,本文中的角分辨率估算方法的估算误差低于0.002°,能够准确估算点云角分辨率;所提出的相对投影密度特征组合可以获得比传统密度特征组合更好的分类效果,总体分类精度达到91.47%,在获得相似精度的同时,提高了杆状物、车辆等类别的提取精度。同时,实验还证明了格网单元大小会影响局部点密度的估计,影响最终分类精度。
在未来的工作中,可以考虑点云间上下文关系及其物理属性确定局部点密度的精确值。此外,可以探索更加合适的特征选择方法并结合平滑标签进一步优化3维场景分析的结果。
顾及点密度与未知角分辨率的地面点云分类
Classification of terrestrial point cloud considering point density and unknown angular resolution
-
摘要: 为了解决地面激光点云角分辨未知和点密度变化的问题, 提出了一种顾及密度变化与未知角分辨率的地面激光点云分类方法。采用随机邻域分析的角分辨率估算法改进传统点密度计算方法, 结合角分辨率提出顾及密度变化的格网特征提取方法, 并将本文中所提出的方法在3组数据上进行了实验验证。结果表明, 该角分辨率估算方法的估算误差小于0.002°, 能够准确地估算点云角分辨率; 与传统点密度特征相比, 本文中提出的相对投影密度可以提高点云分类的整体精度, 以及在车、杆状物等地物类别上的分类效果。该方法能准确估算点云角分辨率, 以较高精度实现点云分类, 可为大规模地面激光点云的密度自适应处理提供参考。Abstract: In order to solve the problems of unknown angular resolution and point density variation of terrestrial laser point cloud, a classification method considering density change and unknown angular resolution was proposed in this paper. To improve the traditional point density calculation method, the angular resolution estimation method of random neighborhood analysis was presented. Then we combine angular resolution to propose a grid feature extraction method which takes density variation into account. The proposed method was tested on three datasets. The result shows that the error of our method is smaller than 0.002°, which can accurately estimate the angular resolution. And compared with traditional density feature, our method can improve the overall accuracy of point cloud classification, and perform well in the extraction of cars and pole. The angle resolution can be accurately estimated with this method, and the point cloud can be classified with higher accuracy, which can provide a reference for density adaptive processing of large-scale terrestrial laser point clouds.
-
Key words:
- laser technique /
- classification /
- point density /
- angular resolution /
- relative projection density
-
图 2 水平和竖直角间隔直方图构建与分析(Δ=0.005°)
Figure 2. Construction and analysis of horizontal and vertical angular interval histograms (Δ=0.005°)
图 5 相关密度变化情况
a—扫描线及其周围地物 b—点密度变化 c—理论点密度变化 d—相对投影密度变化
Figure 5. Density variable
a—scanline and surrounding objects b—point density variable c—theoretical point density variable d—relative projection density variable
图 6 实验数据(高程渲染)
a—数据1 b—数据2 c—数据3
Figure 6. Test data colored by height
a—data set 1 b—data set 2 c—data set 3
图 7 不同特征组合的分类结果
a—相对投影密度特征组合 b—传统密度特征组合 c—类别参考
Figure 7. Classification results of different feature combinations
a—relative projection density feature combination b—traditional density feature combination c—ground truth
图 8 车类别分类结果可视化对比
a—相对投影密度特征组合 b—传统密度特征组合
Figure 8. Visual comparison of car class classification results
a—relative projection density feature combination b—traditional density feature combination
表 1 实验数据信息
Table 1. Test data information
data set scanner model point number angular resolution during scanning/(°) horizontal direction vertical direction 1 Reigl-VZ400 53101629 0.02 0.02 2 Reigl-VZ500 15613009 0.038 0.038 3 STONEX X300 1876543 0.09 0.09  下载: 导出CSV
下载: 导出CSV
表 2 场景内各地物类别基本信息
Table 2. Basic information about per class of objects in the scene
class point number sample building 2279283 1000 pedestrian 625268 1000 car 133672 1000 pole 24923 1000 vegetation 3663557 1000 others 234328 1000 ground points 8652023 — total 15613009 6000
下载: 导出CSV
表 3 10次估算得到的水平角分辨率平均误差
Table 3. Estimated mean error of horizontal sampling interval of 10 runs on each dataset
data set our method/(°) based on point spacing/(°) 1 0.0004 0.0041 2 0.0007 0.0048 3 0.0002 0.0019
下载: 导出CSV
表 4 10次估算得到的竖直角分辨率平均误差
Table 4. Estimated mean error of vertical sampling interval of 10 runs on each dataset
data set our method/(°) based on point spacing/(°) 1 0.0006 0.0035 2 0.0013 0.0046 3 0.0003 0.0019
下载: 导出CSV
表 5 不同特征组合的精度指标
Table 5. Accuracy indicators under different feature combinations
feature combination class F1/% recall/% precision/% OA/% relative projection density building 96.62 95.42 97.85 91.47 vegetation 93.19 88.50 98.41 car 70.92 94.50 56.78 pole 41.26 92.70 26.57 pedestrian 99.14 98.31 99.98 others 49.51 79.53 35.95 traditional density features building 93.34 90.10 96.82 88.36 vegetation 92.08 87.29 97.44 car 51.55 84.31 37.15 pole 23.13 80.26 13.52 pedestrian 97.99 96.94 99.05 others 44.12 68.50 32.56
下载: 导出CSV
-
[1] 林承达, 谢良毅, 韩晶, 等. 基于激光点云的农田玉米种植株数数目识别[J]. 激光技术, 2022, 46(2): 220-225. LIN Ch D, XIE L Y, HAN J, et al. Recognition of the number of corn plants in farmland based on laser point cloud[J]. Laser Technology, 2022, 46(2): 220-225(in Chinese). [2] ZHU X, SKIDMORE A K, DARVISHZADEH R, et al. Foliar and woody materials discriminated using terrestrial LiDAR in a mixed natural forest[J]. International Journal of Applied Earth Observation and Geoinformation, 2018, 64: 43-50. doi: 10.1016/j.jag.2017.09.004 [3] 黄帆, 李维涛, 侯阳飞, 等. 激光点云的隧道数据处理及形变分析[J]. 测绘科学, 2019, 44(5): 132-137. doi: 10.16251/j.cnki.1009-2307.2019.05.020 HUANG F, LI W T, HOU Y F, et al. Tuneldata processing and deformation analysis study based on laser point cloud[J]. Science of Surveying and Mapping, 2019, 44(5): 132-137(in Chinese). doi: 10.16251/j.cnki.1009-2307.2019.05.020 [4] LAI X D, YANG J R, LI Y X, et al. A building extraction approach based on the fusion of LiDAR point cloud and elevation map texture features[J]. Remote Sensing, 2019, 11(14): 1636. doi: 10.3390/rs11141636 [5] PAN Y, DONG Y Q, WANG D L, et al. Three-dimensional reconstruction of structural surface model of heritage bridges using UAV-based photogrammetric point clouds[J]. Remote Sensing, 2019, 11(10): 1204. doi: 10.3390/rs11101204 [6] 胡海瑛, 惠振阳, 李娜. 基于多基元特征向量融合的机载LiDAR点云分类[J]. 中国激光, 2020, 47(8): 0810002. HU H Y, HUI Zh Y, LI N. Airborne LiDAR point cloud classification based on multiple-entity eigenvetor fusion[J]. Chinese Journal of Lasers, 2020, 47(8): 0810002(in Chinese). [7] 薛豆豆, 程英蕾, 释小松, 等. 综合布料滤波与改进随机森林的点云分类算法[J]. 激光与光电子学进展, 2020, 57(22): 221017. XUE D D, CHENG Y L, SHI X S, et al. Point clouds classification algorithm based on cloth filtering algorithm improved random forest[J]. Laser & Optoelectronics Progress, 2020, 57(22): 221017(in Chinese). [8] XU Y Sh, YE Zh, YAO W, et al. Classification of LiDAR point clouds using supervoxel-based detrended feature and perception-weighted graphical model[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 13: 72-88. [9] WEINMANN M, JUTZI B, HINZ S, et al. Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 105: 286-304. doi: 10.1016/j.isprsjprs.2015.01.016 [10] CHEN M L, LIU X J, ZHANG X Y, et al. Building extraction from terrestrial laser scanning data with density of projected points on polar grid and adaptive threshold[J]. Remote Sensing, 2021, 13(21): 4392. doi: 10.3390/rs13214392 [11] CHE E, OLSEN M J. Fast ground filtering for TLS data via scanline density analysis[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 129: 226-240. [12] 史文中, 李必军, 李清泉. 基于投影点密度的车载激光扫描距离图像分割方法[J]. 测绘学报, 2005, 34(2): 95-100. SHI W Zh, LI B J, LI Q Q. A method for segmentation of range image captured by vehicle-borne laser scanning based on the density of projected points[J]. Acta Geodaetica et Cartographica Sinica, 2005, 34(2): 95-100(in Chinese). [13] SUN H, WANG G X, LIN H, et al. Retrieval and accuracy assessment of tree and stand parameters for Chinese fir plantation using terrestrial laser scanning[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(9): 1993-1997. [14] CHENG X L, CHENG X J, LI Q, et al. Automatic registration of terrestrial and airborne point clouds using building outline features[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(2): 628-638. [15] LIU K Q, WANG W G, THARMARASA R, et al. Dynamic vehicle detection with sparse point clouds based on PE-CPD[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(5): 1964-1977. [16] DEMANTKÉ J, MALLET C, DAVID N, et al. Dimensionality based scale selection in 3D lidar point clouds[J]. ISPRS-International Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences, 2011, 38(5): 97-102. [17] 李健, 姚亮. 融合多特征深度学习的地面激光点云语义分割[J]. 测绘科学, 2021, 46(3): 133-139. LI J, YAO L. Ground laser point cloud semantic segmentation based on multi-feature deep learning[J]. Science of Surveying and Mapping, 2021, 46(3): 133-139(in Chinese). [18] ATIK M E, DURAN Z, SEKER D Z. Machine learning-based supervised classification of point clouds using multiscale geometric features[J]. ISPRS International Journal of Geo-Information, 2021, 10(3): 187. [19] CHEN M L, WAN Y C, WANG M W, et al. Automatic stem detection in terrestrial laser scanning data with distance-adaptive search radius[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(5): 2968-2979. [20] CHEN M L, PAN J P, XU J Zh. Classification of terrestrial laser scanning data with density-adaptive geometric features[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(11): 1795-1799. [21] HACKEL T, SAVINOV N, LADICKY L, et al. Semantic3d. net: A new large-scale point cloud classification benchmark[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2017, IV-1-W1: 91-98. [22] DONG Zh, LIANG F X, YANG B Sh, et al. Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 163: 327-342. [23] ZHANG W M, QI J B, WAN P, et al. An easy-to-use airborne LiDAR data filtering method based on cloth simulation[J]. Remote Sensing, 2016, 8(6): 501. [24] 张志刚, 孙立才, 汪沛. 基于激光扫描技术的行人检测方法研究[J]. 计算机科学, 2016, 43(7): 328-331. ZHANG Zh G, SUN L C, WANG P. Research on pedestrian detection method based on laser scanning[J]. Computer Science, 2016, 43(7): 328-331(in Chinese). -

 点击查看大图
点击查看大图

计量
- 文章访问数: 3785
- HTML全文浏览量: 2661
- PDF下载量: 17
- 被引次数: 0
