 网站地图
网站地图














-
自然界中云粒子具有类型多样、形态各异、尺度分布范围广等特征,其微观分布信息是研究云微物理过程及降水形成机制的重要依据[1]。传统微波天气雷达采用遥感探测,无法获得云层内精细分布信息。早期的铝箔碰撞采样法依靠显微镜读取云粒子数,测量精度较低,对100 μm以下小粒子难以测量,且不具备实时性[2]。激光云粒子探测仪基于激光技术,可直接获取各类云降水粒子的大小、数量及图像,实现粒子级观测,是迄今可对云粒子微观分布进行直接探测的唯一手段,具有精度高、实时性强、测量结果直观准确等优点,数据结果可应用于大气遥感信息反演、数值天气预报模式的物理过程以及人工影响天气等研究领域[3-4]。
激光云粒子探测技术分为散射测量和成像测量两类。散射测量基于微粒的米氏散射原理[5],可对亚微米至微米级粒子的大小进行测量。成像测量则基于微粒成像技术,可以得到微米至毫米级粒子的1维图像;按探测器类型又可分为线阵扫描成像技术及面阵成像技术[6]。美国Particle Measurement System(PMS)公司于20世纪70年代开始研究基于米氏散射的激光云粒子探测技术,并研制出前向散射谱仪探头[7],可测量粒径范围为2 μm~47 μm。在此基础上,美国Droplet Measurement Technologies(DMT)公司开发出云滴探测仪探头,可实现对2 μm~50 μm云滴的测量[8]。此外,美国Stratton Park Engineering Company(SPEC)公司也开发出快速前向散射谱仪探头[9]。成像探测技术方面,DMT公司于20世纪90年代开发出云粒子成像探测仪探头和及降水粒子成像探测仪探头,可实现对25 μm~1550 μm及100 μm~6200 μm云降水粒子的测量。SPEC公司也相继开发了基于线阵成像技术的云粒子探测设备,包括2维成像探头、高通量降水粒子谱仪探头等产品[10]。
西南技术物理研究所于2018年研制出激光云粒子成像仪,可对25 μm~1550 μm的云粒子进行成像测量,成像分辨率为25 μm。
-
线阵成像技术原理如图 1所示。激光束经准直匀化后,作为探测光束照亮采样区域,并经接收光学系统到达线阵探测器。若采样区域无粒子,则探测器完全被背景光照明。当粒子通过探测光束时,其沿光轴方向的投影经光学系统成像,通过光电测量及信号处理即可还原得到粒子图像。64元线阵探测器位于粒子成像面,在背景光照射下,处于成像阴影区外的像元输出高电平信号,而处于成像阴影区的像元则按照光强分布输出相应的电平信号。该信号与系统设定的阈值电压进行比较,若高于该值则该像元记为“1”,反之记为“0”。同一时刻探测器输出的64位0、1信号即为一个原始图像帧。

图 1 线阵成像原理
Figure 1. Principle of linear array imaging
对于球形粒子,根据夫琅和费圆盘衍射模型,其图像为明暗相间的同心圆环,严格的光强分布可由Fresnel-Kirchhoff衍射公式计算得到。衍射理论表明,当粒子尺度较小时,衍射图案导致计算出的粒径比真实值偏小。KNOLLENBERG对此进行了专门研究[11],通过设定适当的测量景深(粒子有效测量区域)及阈值电压,可将该偏差降到最低。研究表明:对半径为r的粒子,若照射激光波长为λ,则在景深限定为±3r2/λ,且阈值电压设为高电平的40%时,实测粒径误差小于10%。
上述原始图像帧通过高速采集输入数据处理单元进行信息处理,经抽帧、拼合即可还原粒子图像。抽帧频率需结合粒子实时速度确定,帧率不当则会导致粒子图像在飞行方向发生畸变,如图 2所示。

图 2 不同帧率下的粒子图像
Figure 2. Particle images at different frame rate
帧率匹配公式如下:
$ f=v / R $
(1) 式中,f为帧率,v为粒子飞行速率,R为成像分辨率。进一步根据粒子图像所占据的探测器单元个数,可确定粒子的横向和纵向尺寸。实际飞行时,仪器搭载探测飞机,探测仪前端安装有空速管,其前端靠近探测光束,且正对来流方向,由其测量到的空速即为粒子飞行速率v。
需要说明的是,对于非球形粒子,实测的粒子图像反映了粒子在光轴视角方向的1维形态,与粒子取向有关。由于云粒子的观测基于宏观统计而非单粒子研究,大量粒子分布存在随机性,因而个体粒子因特定取向得到的测量结果(如形态、大小)并不影响对粒子群集体特征的研究。
-
激光云粒子成像仪系统主要由激光器、发射光学系统、接收光学系统、线阵探测器以及数据处理单元组成,如图 3所示。

图 3 激光云粒子成像仪组成框图
Figure 3. Composition block diagram of laser cloud particle imaging probe
系统采用635 nm半导体激光器,通过光纤输出后,由发射光学系统依次进行准直、整形、匀化,照射探测区域。接收光学系统实现对粒子的放大成像,设计成像倍率为6×。探测光束经接收光学系统后变为近似均匀的长条状光束(如图 4所示),该光束照射到线阵探测器表面,为系统提供背景照明。

图 4 匀化激光束
Figure 4. Homogenized beam
系统采用64元高分辨率线阵探测器(如图 5所示),为保证成像精度及成像质量,探测器阵列设计为窄条状,具体参数如表 1所示。

图 5 高分辨率线阵探测器
Figure 5. Linear array detector of high resolution
表 1 阵列探测器参数
Table 1. Parameters of array detector
pixels of detector pixel size pitch responsivity 64×1 120 μm×150 μm 150 μm 0.4 A/W 基于上述原理和技术,研制的机载云粒子成像仪如图 6所示,主要技术指标如表 2所示。

图 6 激光云粒子成像仪
Figure 6. Laser cloud particle imaging probe
表 2 仪器主要技术指标
Table 2. Specifications of the instrument
particle size range resolution sampling area length wavelength imaging magnification data products 25 μm~1550 μm 25 μm 80 mm 635 nm 6× particle image,size distribution -
为了对仪器粒子成像效果及粒径测量准确性进行测试,在实验室条件下,通常采用模拟粒子进行[12]。如图 7所示,在玻璃转盘上制作不同直径的镀膜圆点,使用专用工装结构进行固定,通过电机驱动转盘转动,使不同膜点依次经过探测光束,模拟云粒子经过。

图 7 粒子模拟圆盘示意图
Figure 7. Diagram of simulated particle disk
为保证测量结果的准确性,测试前需对模拟转盘进行调节,使得光束方向与转盘盘面垂直,且光束纵轴与转盘径向重合,以确保膜点垂直于光面穿越探测光束。实测得到粒子图像及谱分布如图 8所示。由于灰尘影响以及盘面抖动仪器测量误差等原因,导致粒子谱分布并非仅仅出现在理论对应的粒径通道。

图 8 模拟成像测试
Figure 8. Simulated imaging test
根据实测数据,对100 μm, 250 μm, 500 μm, 1000 μm以及1550 μm膜点的测量结果进行统计,得到不同大小膜点的平均直径(见表 3)。
表 3 模拟成像粒径计算
Table 3. Particle size calculation of simulated imaging
nominal value/μm mean value/μm absolute error/μm absolute error/% 100 90.5 -9.5 -9.5 250 233.3 -16.7 -6.7 500 494.1 -5.9 -1.2 1000 1000.6 0.6 0.1 1550 1550.0 0 0 结果表明:对100 μm~1550 μm的粒子,研制仪器测量直径的绝对误差不大于16.7 μm,处于25 μm测量分辨率范围内,相对误差低于10%,可认为粒径测量结果准确(膜点制作的精度公差约20 μm,对50 μm膜点测量结果影响较大,故未纳入分析)。
-
2021-05-31,机载云粒子成像仪在内蒙古赤峰市进行了飞行试验,挂载机型为运-12飞机。云粒子成像仪挂载于左侧机翼下方,飞机于09:40从赤峰机场起飞,起飞后主要在翁牛特旗境内飞行。从09:44开始平飞,至11:39结束平飞开始降落,大约12:00返回赤峰机场,飞行轨迹如图 9所示。

图 9 飞行轨迹(2021-05-31,内蒙古赤峰市)
Figure 9. Flight path(2021-05-31, Chifeng, Inner Mongolia)
-
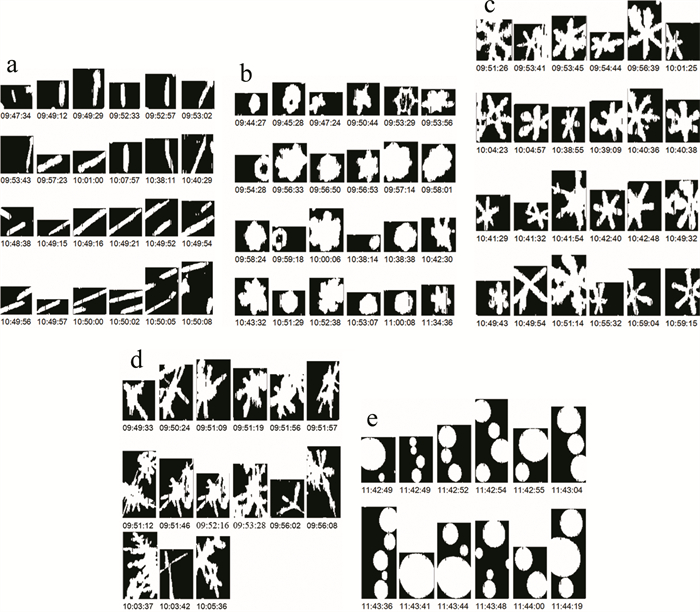
本次飞行试验测得各类云降水粒子成像,包括水滴、冰晶、雪晶,选取了部分粒子图像,如图 10所示。

图 10 云粒子图像实测
Figure 10. Measured image of cloud particle
根据上述云粒子成像结果来看,仪器能够较好地实现对云层当中不同类型云滴、冰雪晶等粒子的成像,粒子图像清晰,边缘齐整无毛刺,形态细节可见,成像质量较好。
图 11中为本次飞行过程中的高度和气温变化曲线。可以看出,进入平飞阶段后,飞行高度保持在约3800 m,气温约为-7 ℃~-1 ℃之间。

图 11 飞行过程高度及气温变化曲线
Figure 11. Altitude and temperature variation curve during flight
根据云物理理论[13],云层内粒子分布与高度、气温、湿度等条件密切相关,不同环境下的云粒子呈现不同的相态以及形态,对此前人已有大量的观测和分析[14-17]。对本次试验结果结合环境条件进行分析,可以看到:在平飞阶段,云层温度在-6 ℃~-3 ℃之间,粒子主要为片状和针柱状冰晶; 而在下降阶段,处于0 ℃层附近,粒子几乎全为液态雨滴(如表 4所示)。结合现有研究结果可知,本次测量的云粒子分布结果符合云物理形成规律。
表 4 不同条件下的云粒子分布
Table 4. Cloud particles distribution under different conditions
time altitude/m temperature/℃ phase particle morphology 09:44~11:00 3900~4000 -6~-3 solid acicular,schistic,dendritic,spatial dendritic 11:40~11:45 3700~1000 -1~5 liquid spherical -
根据仪器测量的粒子数浓度变化曲线(如图 12所示)可以看出,该架次飞行试验中有两次明显的入云过程:09:56:03~09:59:53对应第1次入云过程,10:38:03~11:46:46对应第2次入云及下降过程。

图 12 粒子数浓度曲线
Figure 12. Particle number concentration curve
图 13中为本次飞行试验过程测量到的不同粒径通道的云粒子谱分布。由图可知,粒子尺度谱分布在25 μm通道最大,在50 μm通道次大,而在150 μm~175 μm附近出现明显的谱峰。分析认为可能的原因是:在实际测量中,由于不可避免地产生的粒子破碎现象[18](高速飞行的云粒子与仪器前端发生碰撞,碎裂生成较多的小粒子),导致了某些小粒子数量的增加[19]。

图 13 各粒径通道粒子总数
Figure 13. Total number of particles in each particle size channel
为验证测量数据的客观性,根据云粒子谱自然分布规律,对本次飞行试验实测的云粒子数据进行了分析。冰雪晶粒子谱通常服从幂函数[13]或指数分布[20],本文中采用指数关系对谱分布数据进行拟合:
$ N(d)=\sigma \mathrm{e}^{-\lambda d} $
(2) 式中,N(d)为一个采样周期内各粒径通道粒子的个数,d为粒径,σ和λ为系数。根据(2)式对两次入云过程测量到的粒子数据进行拟合,拟合结果如图 14、图 15所示。

图 14 粒子谱分布数据拟合(09:56:03~09:59:53)
Figure 14. Particle spectrum distribution data fitting(09:56:03~09:59:53)

图 15 粒子谱分布数据拟合(10:38:03~11:46:46)
Figure 15. Particle spectrum distribution data fitting(10:38:03~11:46:46)
各参数拟合结果及决定系数如表 5所示。
表 5 两次入云测量数据拟合结果
Table 5. Data fitting results of two measurements through clouds
No. time quantum number of samples σ λ coefficient of determination range average range average 1 09:56:03~09:59:53 171 4.6~72 23 0.0036~0.0097 0.0059 0.67~0.97 2 10:38:03~11:46:46 178 2.7~96 28 0.0032~0.019 0.0053 0.58~0.97 通过对两次入云过程测量的粒子分布数据进行拟合可知:粒子尺度谱符合指数关系,决定系数在0.58~0.97之间,进一步验证了仪器测量结果的准确性。
-
基于微粒线阵成像原理研制出机载云粒子成像仪,该仪器可对云层中25 μm~1550 μm的云粒子进行成像探测。通过地面静态测试,可以得到较好的模拟粒子图像。实际飞行试验表明,所研制仪器能够较好地对云层中各类固、液态云粒子进行成像,各温度层粒子分布符合云物理粒子形成规律,粒子尺度谱满足指数分布规律,从而验证了仪器测量结果的准确性和可靠性。
激光云粒子成像探测仪研制
Laser cloud particle imaging probe
-
摘要: 为了研究云粒子微观特性, 采用激光成像技术、高斯光束匀化处理技术、高分辨率阵列探测器以及图像抽帧还原算法, 研制出激光云粒子成像仪。通过地面模拟测量及实际飞行试验, 对仪器性能进行了测试。结果表明, 研制仪器可实现对25 μm~1550 μm云粒子的成像, 分辨率为25 μm, 粒径测量误差小于9.5%;实测的冰晶粒子形态符合云粒子自然分布规律, 粒子尺度谱符合指数分布, 决定系数在0.58~0.97之间。该研制仪器可为云降水微物理研究提供基础观测数据。Abstract: For studying the micro features of cloud particles, a laser cloud particle imaging probe was developed by using laser imaging technology, homogenizing technology of Gaussian beam, and a high resolution array detector and a frame-extracting algorithm of image. The performance of the instrument was tested through simulation measure and actual flight experiment. The results show that for cloud particles of 25 μm~1550 μm with 25 μm resolution can be imaged with the developed instrument, and the error of particle-size measured is less than 9.5%. The particle shape of ice crystal watched conforms to the natural distribution of cloud particles, the particle-size distribution conforms to the exponential function with a determination coefficient between 0.58 and 0.97.The developed instrument can provide basic observation data for the study of cloud and precipitation microphysics.
-
Key words:
- laser technique /
- cloud particle probe /
- linear array imaging /
- scale spectrum
-
图 3 激光云粒子成像仪组成框图
Figure 3. Composition block diagram of laser cloud particle imaging probe
图 9 飞行轨迹(2021-05-31,内蒙古赤峰市)
Figure 9. Flight path(2021-05-31, Chifeng, Inner Mongolia)
图 10 云粒子图像实测
a—针状 b—片状 c—辐枝状 d—空间辐枝状 e—球形
Figure 10. Measured image of cloud particle
a—acicular b—schistic c—dendritic d—spatial dendritic e—spherical
图 14 粒子谱分布数据拟合(09:56:03~09:59:53)
a—各组样本数据拟合曲线 b—决定系数
Figure 14. Particle spectrum distribution data fitting(09:56:03~09:59:53)
a—fitting curve of each sampling data b—coefficient of determination
图 15 粒子谱分布数据拟合(10:38:03~11:46:46)
a—各组样本数据拟合曲线 b—决定系数
Figure 15. Particle spectrum distribution data fitting(10:38:03~11:46:46)
a—fitting curve of each sampling data b—coefficient of determination
表 1 阵列探测器参数
Table 1. Parameters of array detector
pixels of detector pixel size pitch responsivity 64×1 120 μm×150 μm 150 μm 0.4 A/W  下载: 导出CSV
下载: 导出CSV
表 2 仪器主要技术指标
Table 2. Specifications of the instrument
particle size range resolution sampling area length wavelength imaging magnification data products 25 μm~1550 μm 25 μm 80 mm 635 nm 6× particle image,size distribution
下载: 导出CSV
表 3 模拟成像粒径计算
Table 3. Particle size calculation of simulated imaging
nominal value/μm mean value/μm absolute error/μm absolute error/% 100 90.5 -9.5 -9.5 250 233.3 -16.7 -6.7 500 494.1 -5.9 -1.2 1000 1000.6 0.6 0.1 1550 1550.0 0 0
下载: 导出CSV
表 4 不同条件下的云粒子分布
Table 4. Cloud particles distribution under different conditions
time altitude/m temperature/℃ phase particle morphology 09:44~11:00 3900~4000 -6~-3 solid acicular,schistic,dendritic,spatial dendritic 11:40~11:45 3700~1000 -1~5 liquid spherical
下载: 导出CSV
表 5 两次入云测量数据拟合结果
Table 5. Data fitting results of two measurements through clouds
No. time quantum number of samples σ λ coefficient of determination range average range average 1 09:56:03~09:59:53 171 4.6~72 23 0.0036~0.0097 0.0059 0.67~0.97 2 10:38:03~11:46:46 178 2.7~96 28 0.0032~0.019 0.0053 0.58~0.97
下载: 导出CSV
-
-

 点击查看大图
点击查看大图

计量
- 文章访问数: 3792
- HTML全文浏览量: 2725
- PDF下载量: 29
- 被引次数: 0
