 网站地图
网站地图


-
快速反射镜(fast steering mirror,FSM)简称快反镜[1-3],是通过对反射镜的偏转方向进行精确控制,实现反射光束偏转角度的高精度、高动态控制,具有体积小、工作带宽高、响应速度快、指向精度高等优点,广泛应用于空间通信[4]和深空探测[5-6]等领域,其中深空探测是指脱离地球引力场,对地球以外的太阳系空间和宇宙空间中的天体进行空间探测。由于深空快速反射镜系统在无重力或微重力的太空环境中,需要解决反射镜因温差导致的变形以及线圈散热等问题;并且由于探测器平台的抖动等因素的影响,需要使用快速反射镜补偿探测器在运行和扫描方向产生的像移[7],实现深空探测系统的稳像,保证光束的成像质量。因此,对快速反射镜系统的行程、带宽、功耗以及可靠性均有较高的需求。
从20世纪80年代起,快速反射镜就已经广泛应用于军事以及空间[8]等领域。美国的麻省理工学院林肯实验室研究得最早,于20世纪90年代初开发了一种用于空间激光通信的小口径高带宽快速反射镜,反射镜直径10 mm~16 mm,带宽可达10 kHz,转角范围±13 mrad,指向精度可达0.2 μrad。2006年,林肯实验室基于磁阻原理设计了一款反射镜直径为20 mm的快速反射镜样机[9],带宽可达10 kHz,转角范围±3.5 mrad。2017年,荷兰国家应用科学院设计了一种用于太空空间激光通信的小口径快速反射镜[10-11],反射镜直径为20 mm,带宽可达1 kHz,转角范围±2°,指向精度可达1 μrad。2018年,美国ATA公司开发了一款用于空间光通信的小口径动磁式快速反射镜[12],该反射镜直径为25.4 mm,带宽大于1 kHz,转角范围±1°,指向精度可达5 μrad。国内对音圈电机快速反射镜的研究起步稍晚。中国科学院长春光学精密机械与物理研究所是国内最早对快速反射镜进行研究的单位,于1990年成功研制出了一款采用音圈电机驱动的快速反射镜[13],技术成熟但是体积和重量较大。之后国防科技大学、华中科技大学等单位也都研制了音圈电机快速反射镜,但其在带宽、行程等指标上与国外产品仍有不小的差距。
目前快速反射镜的驱动主要分为压电陶瓷(piezoelectric transition,PZT)与音圈电机(voice coil actuator,VCA)[14-16]两种。VCA相比于PZT,出力较小,但是行程更大、承载能力更强、驱动电压更低,能够满足深空探测对于快速反射镜的各项需求。本文作者深入研究了快速反射镜及其音圈电机驱动,并对其进行了仿真分析。
-
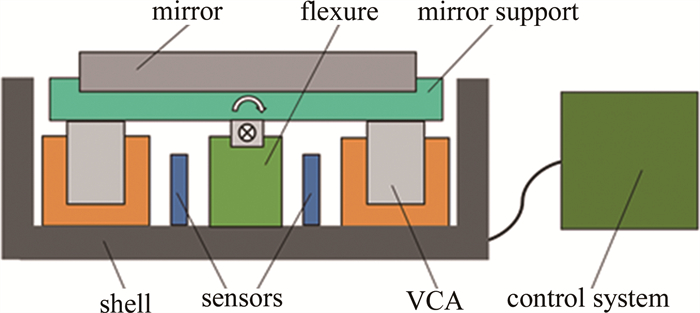
图 1是音圈电机驱动的快速反射镜[17]的结构示意图。主要由以下几个结构部件组成:反射镜、音圈电机、位置传感器、柔性铰链、主控模块以及壳体。其中反射镜选择⌀50 mm×4 mm的单晶硅反射镜,作为整个系统的工作平面以及主要负载,实现反射光束的光学偏转;音圈电机为快速反射镜系统提供动力,其驱动力大小和时间常数决定了快速反射镜的工作带宽,其转角范围决定了快速反射镜的最大转角范围;位置传感器为整个系统提供高分辨率和高精度的反射镜位置测量,实现快速反射镜的高精度指向;柔性铰链为反射镜提供一个旋转轴;主控模块用于接收来自上位机的位置控制信息,读取位置传感器的测量数据,并控制反射镜快速达到指定位置;壳体为整个快速反射镜系统提供支撑。

图 1 快速反射镜的结构示意图
Figure 1. Structure of a FSM
因此,快速反射镜可以被看作一个质量-弹簧-阻尼器系统,此系统的偏转角度θ与驱动力矩M之间的传递函数[18]可以表示为:
$ G(\boldsymbol{s})=\frac{\theta(\boldsymbol{s})}{\boldsymbol{M}(\boldsymbol{s})}=\frac{1}{ \boldsymbol{As}^2+2 c x^2 \boldsymbol{s}+2 K x^2} $
(1) 式中,s是一个复数,是变换后的表达式在复空间上的一个虚变量;A =2mx2+ J,A为快速反射镜的转动惯量,m为音圈电机动子质量,x为力作用点到转轴的距离,J为反射镜转动惯量;c为等效阻尼系数;K为柔性支承轴向扭转刚度。将这些参数代入传递函数中,得到快速反射镜的性能指标,如表 1所示。
表 1 快速反射镜性能指标
Table 1. FSM performance goals
performance parameter design goal mirror aperture 50 mm angular stroke ±1° bandwidth 500 Hz torque 240 N·mm momen of inertia 7.5 kg·mm2 为了达到快速反射镜的性能指标, 以⌀50 mm×4 mm的单晶硅反射镜和铝制反射镜支架作为音圈电机的主要负载, 对电机的出力特性进行理论和仿真分析。
-
音圈电机结构主要由线圈、永磁体(permanent magnet,PM)以及磁轭这三部分组成,根据运动部件不同可分为动圈式和动磁式,动圈式设计的优点是运动部件重量轻,从而容易实现较高的带宽,但有两个缺点:(1)线圈通电产生的大量热会直接传递到反射镜镜架上,影响反射镜面型精度;(2)运动线圈会产生线缆拖拽,长时间工作容易出现线缆断裂的问题,降低快速反射镜的可靠性。而动磁式结构能够避免线圈与反射镜支架的直接接触,提高了线圈的散热能力和反射镜面型精度;并且避免了线缆拖拽导致的稳定性问题,能够有效解决深空快速反射镜系统对快速反射镜散热,保证反射镜的面型精度和快速反射镜的可靠性,因此本文中选择动磁式音圈电机作为驱动器件。
动磁式音圈电机(voice coil motor,VCM)结构如图 2a所示,图 2b为剖面结构示意图。其中磁轭、永磁体和反射镜支架共同组成快速反射镜的运动部件。电机磁路和磁极分布如图 2b所示,图中永磁体内部磁场沿z轴正方向,并经由磁轭、线圈和空气回到磁体内部,形成磁回路。当线圈按如图 2b所示通入电流时,左右两侧永磁体所受电磁力方向相反,分别如图中红色和蓝色箭头所示,这两个力形成一个绕回转轴顺时针偏转的驱动力矩,带动反射镜偏转。改变电流的大小和方向,偏转角度和方向也随之改变。图中,hAl是Al制反射镜支架的高度。

图 2 a—动磁式音圈电机结构图b—动磁式音圈电机剖面结构示意图
Figure 2. a—structure of moving-magnet type VCM b—sectional structure of moving-magnet type VCM
-
为了满足快速反射镜的驱动力矩要求,对音圈电机的出力进行了理论分析。根据洛伦兹力定律[19],对于单个音圈电机,永磁体产生一定磁场强度的静磁场,线圈电流与该磁场相互作用产生的电磁力F可表示为:
$ \boldsymbol{F}=i_{\mathrm{c}} L_{\mathrm{c}} \times \boldsymbol{B} $
(2) 式中,Lc为磁场范围内的线圈长度,ic为线圈电流大小,B为永磁体的磁通密度。
根据图 2所示的音圈电机结构,左右两个音圈电机所形成的驱动力矩M可表示为:
$ \boldsymbol{M}=2 \boldsymbol{F} R=2 R \int_0^{d_{\mathrm{c}}} \boldsymbol{B}_{\mathrm{g}}(x) J_{\mathrm{c}} h_{\mathrm{c}} l_{\mathrm{c}} \mathrm{d} x $
(3) 式中,Bg(x)为气隙中的磁通密度;Jc为线圈中的电流密度,dc,hc,lc为线圈的径向厚度、轴向高度以及平均周长;R为力作用点到转轴的距离;x为积分中线圈径向厚度方向上的任意一点,取值范围为0~dc。
由于线圈比较集中,因此某一时刻的电流密度Jc为定值,并且∫0dcBg(x)dx表示为永磁体的磁通量Φm,因此(3)式可改写为:
$ \boldsymbol{M}=2 \varPhi_{\mathrm{m}} J_{\mathrm{c}} h_{\mathrm{c}} l_{\mathrm{c}} R $
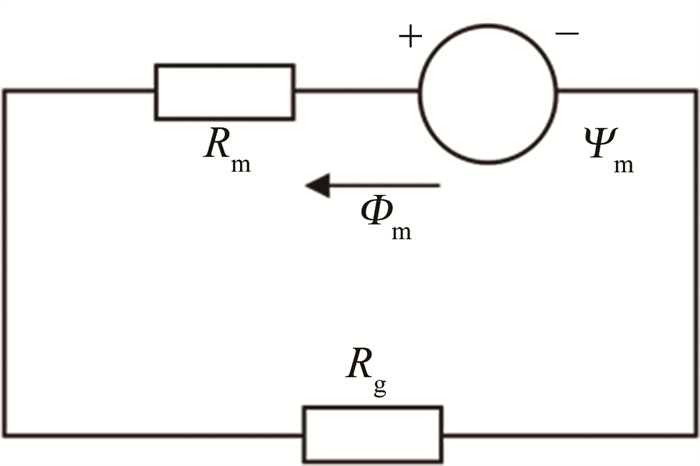
(4) 根据图 2b中的永磁体磁路,可以得出如图 3所示的等效磁路图。

图 3 动磁式音圈电机等效磁路图
Figure 3. Equivalent magnetic circuit of a moving-magnet type VCM
永磁体的磁动势表达式为:
$ \varPsi_{\mathrm{m}}=\varPhi_{\mathrm{m}}\left(R_{\mathrm{m}}+R_{\mathrm{g}}\right) $
(5) 式中,Rm为永磁体的磁阻,Rg为气隙的磁阻。分别计算Rm和Rg的值,代入(5)式,可以得到永磁体磁通量的表达式:
$ \boldsymbol{\varPhi}_{\mathrm{m}}=\frac{{\rm{\mathsf{π}}} \boldsymbol{B}_{\mathrm{r}} h_{\mathrm{m}}}{\frac{2\left(g+d_{\mathrm{c}}\right)}{\left(2 r_{\mathrm{m}}+g+d_{\mathrm{c}}\right) h_{\text {core }}+h_{\mathrm{m}} / r_{\mathrm{m}}^2}} $
(6) 式中,Br为永磁体剩余磁通密度,rm为永磁体半径,hm为永磁体高度,hcore为磁轭高度,g为气隙尺寸。
将(6)式代入(4)
式中,可以得到:
$ \boldsymbol{M}=\frac{{\rm{\mathsf{π}}} \boldsymbol{B}_{\mathrm{r}} h_{\mathrm{m}} J_{\mathrm{c}} h_{\mathrm{c}} l_{\mathrm{c}} R}{\frac{g+d_{\mathrm{c}}}{\left(2 r_{\mathrm{m}}+g+d_{\mathrm{c}}\right) h_{\text {core }}+h_{\mathrm{m}} / r_{\mathrm{m}}{ }^2}} $
(7) -
将快速反射镜的性能指标作为约束条件,快速反射镜的反射镜直径为50 mm,转角范围为±1°,仿真分析的目标是在性能指标的尺寸约束条件下,使快速反射镜具备更好的动态特性,实现500 Hz的带宽。
由(7)式可知,影响音圈电机出力的关键因素[20-21]包括:磁铁几何尺寸、线圈几何尺寸以及气隙尺寸等。为了研究这些结构参数对音圈电机出力特性的影响,采用有限元分析软件对图 2b所示的音圈电机进行仿真分析。当其它参数保持不变时,分别将永磁体的高度、半径和线圈的匝数以及线圈与磁铁之间的气隙尺寸等参数设置为单一变量,研究各个参数对音圈电机出力特性的影响。
-
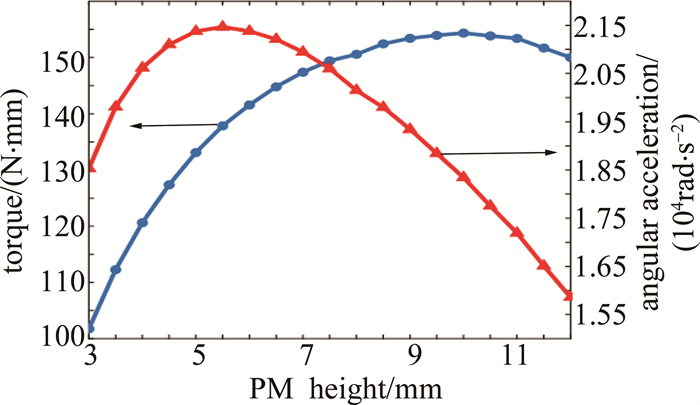
为了研究永磁体高度hm对电机出力特性的影响,对永磁体高度在3 mm~6 mm的范围内以0.2 mm为步长进行参数化扫描,通过仿真得到驱动力矩和角加速度与永磁体高度的关系曲线,如图 4所示。驱动力矩随着永磁体高度的增加先逐渐增大,并且在永磁体高度为10 mm时达到最大值,随后逐渐减小;快速反射镜运动部件的角加速度先随永磁体高度的增加而逐渐增大,并在永磁体高度为5.5 mm时达到最大值,随后逐渐减小。由于电机永磁体高度的增加,电机磁路中的空气磁阻以及快速反射镜运动部件的转动惯量也会随之增大。为了使快速反射镜具有更高的带宽,永磁体高度为5.5 mm时为最佳。

图 4 驱动力矩和角加速度与永磁体高度的关系
Figure 4. Torque and angular acceleration vs. PM height
-
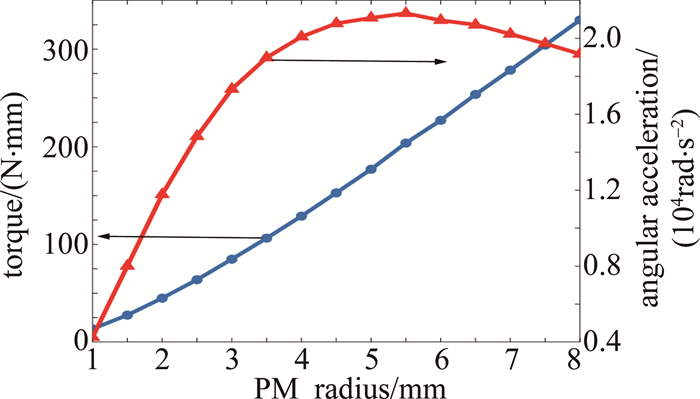
为了研究永磁体半径rm对电机出力特性的影响,由于快速反射镜的外形尺寸约束,将永磁体半径的变化范围设置在1 mm~8 mm内,并且以1 mm为步长进行参数化扫描,通过仿真得到驱动力矩和角加速度与永磁体半径的关系曲线,如图 5所示。驱动力矩随着永磁体半径的增加而近似线性增长;而快速反射镜运动部件的角加速度会先随永磁体半径的增加而逐渐增大,并在永磁体半径为5.5 mm时达到最大值,之后逐渐减小。由于电机永磁体半径的增加,快速反射镜运动部件的转动惯量也会随之增大,使其角加速度和驱动力矩的最优解通常是不同的。因此为了使快速反射镜具有更大的工作带宽,永磁体半径为5.5 mm时为最佳。

图 5 驱动力矩和角加速度与永磁体半径的关系
Figure 5. Torque and angular acceleration vs. PM radius
-
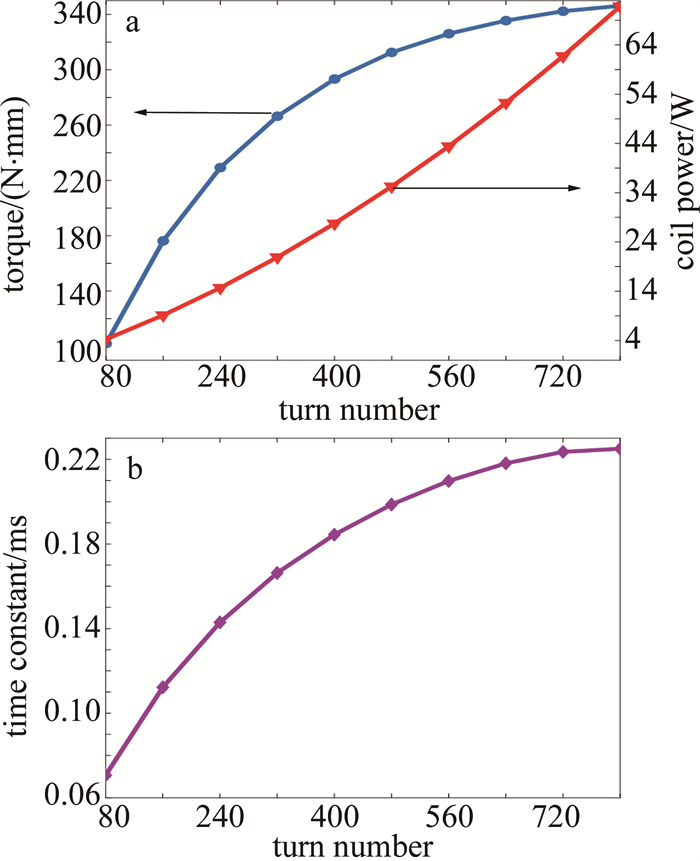
为了研究线圈的匝数对电机出力特性的影响,使线圈匝数在80~800匝的范围内以80匝为步长进行参数化扫描。通过仿真得到驱动力矩和线圈功率与线圈匝数的关系曲线,如图 6a所示,线圈时间常数与线圈匝数的关系曲线如图 6b所示。驱动力矩和线圈时间常数随着线圈匝数的增加而逐渐增大,并逐渐趋于稳定;而电机线圈功耗随着线圈匝数的增加而增大。因此,线圈匝数不是越大越好,在驱动力矩增大的同时,会增加线圈时间常数以及快速反射镜的功耗,从而影响快速反射镜系统的工作带宽和散热性能。

图 6 a—驱动力矩和线圈功率与线圈匝数的关系b—线圈时间常数与厚度的关系
Figure 6. a—torque and coil power vs. turn number of coil b—time constant vs. turn number of coil
-
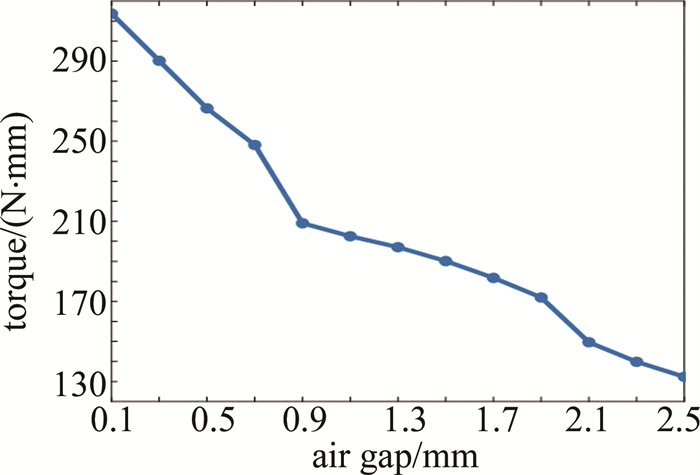
为了研究线圈与永磁体之间的气隙尺寸g对电机出力特性的影响,将气隙设置在0.5 mm~3 mm的范围内,并且以0.5 mm为步长进行参数化扫描,通过仿真得到驱动力矩与气隙尺寸的关系曲线,如图 7所示。由图中可以看出,驱动力矩随着气隙尺寸的增加而逐渐减小,但是快速反射镜的转角范围随着气隙尺寸的增加而增大。因此,快速反射镜需要在满足转角范围的前提下,采用较小的气隙尺寸。

图 7 驱动力矩与气隙尺寸的关系
Figure 7. Torque vs. air gap
-
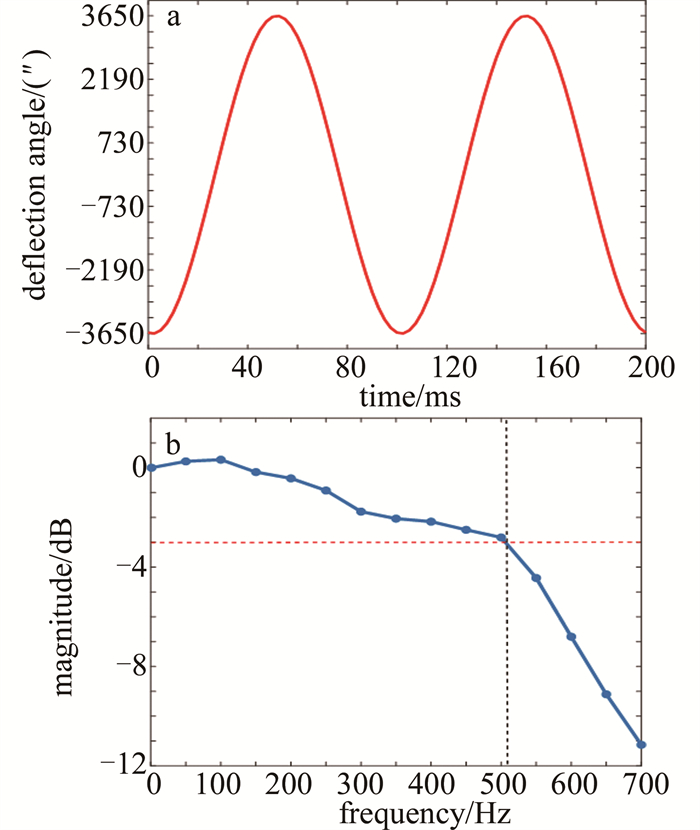
以⌀50 mm×4 mm的单晶硅反射镜作为负载,选择动磁式音圈电机作为电磁驱动,分析了快速反射镜的一般构成、工作原理以及数学模型,以此提出预期的性能指标。对音圈电机的出力进行了理论推导,并使用有限元分析软件对驱动扭矩等特性参数与永磁体高度、永磁体半径、线圈匝数以及气隙尺寸的变化规律进行了分析,相较于已有的研究工作,对音圈电机完成了更为细致和全面的规律性研究,有利于参考性能指标来更加精准地优化电机的尺寸参数,基于此设计并制作了快速反射镜样机,搭建了实验平台并进行测试,得到快速反射镜的转角范围大于±1°,带宽(3 dB)大于500 Hz,能够达到预期要求的性能指标。该研究结果有助于推广光学快速反射镜在深空探测、激光通信、光电对抗等领域的应用。
用于深空探测快速反射镜的电磁驱动
Research on electromagnetic drive of fast steering mirror for deep space detection
-
摘要: 为了实现深空探测系统对成像光束的高速和高精度控制, 以⌀50 mm×4 mm的单晶硅反射镜作为负载, 采用理论和仿真分析相结合的方法, 对音圈电机驱动的快速反射镜进行了理论分析和实验验证。给出了该快速反射镜的一般构成、工作原理及数学模型, 采用有限元法分析计算了音圈电机线圈、永磁体和气隙尺寸对驱动力矩的影响, 最后设计、制作了快速反射镜样机, 并进行了测试。结果表明, 快速反射镜的转角范围大于±1°, 带宽(3 dB)大于500 Hz。该研究结果有助于推广光学快速反射镜在深空探测、激光通信、光电对抗等领域的应用。Abstract: In order to realize the high speed and high precision control of the imaging beam for the deep space detection system, the theoretical analysis and experimental verification of the fast steering mirror (FSM) driven by the voice coil actuators (VCA) were carried out with a ⌀50 mm×4 mm silicon mirror as the load. At first, the drive mechanism, configuration, and mathematical model of the FSM were presented. Then the finite element method was used to study the influence of the coil, permanent magnet and air gap size of the VCA on the driving torque. Finally, a prototype of abovementioned FSM was designed, produced, and tested, respectively. The result indicates that, the angular stroke of the FSM is greater than ±1°, and the 3 dB bandwidth is greater than 500 Hz. The procedure disclosed here is helpful for FSM to be applied in the fields of deep space detection, laser communication, photoelectric countermeasure, etc.
-
图 2 a—动磁式音圈电机结构图b—动磁式音圈电机剖面结构示意图
Figure 2. a—structure of moving-magnet type VCM b—sectional structure of moving-magnet type VCM
图 6 a—驱动力矩和线圈功率与线圈匝数的关系b—线圈时间常数与厚度的关系
Figure 6. a—torque and coil power vs. turn number of coil b—time constant vs. turn number of coil

图 8 a—偏转角度与时间的关系b—幅频特性
Figure 8. a—deflection angle vs. time b—magnitude vs. frequency
表 1 快速反射镜性能指标
Table 1. FSM performance goals
performance parameter design goal mirror aperture 50 mm angular stroke ±1° bandwidth 500 Hz torque 240 N·mm momen of inertia 7.5 kg·mm2  下载: 导出CSV
下载: 导出CSV
-
[1] 张玮钒, 颜昌翔, 高志良, 等. 二自由度快速控制反射镜系统固有频率优化设计[J]. 红外与激光工程, 2021, 50(6): 251-262. ZHANG W F, YAN Ch X, GAO Zh L, et al. Optimal design of natural frequency of two-degree-of-freedom fast steering mirror system[J]. Infrared and Laser Engineering, 2021, 50(6): 251-262(in Chinese). [2] 赵磊, 纪明, 王明歆, 等. 快速反射镜驱动形式对伺服带宽的影响[J]. 光学精密工程, 2019, 27(2): 393-401. ZHAO L, JI M, WANG M X, et al. Influence of driving forms on servo bandwidth in fast steering mirror[J]. Optics and Precision Engineering, 2019, 27(2): 393-401(in Chinese). [3] 艾志伟, 谭毅, 吴琼雁, 等. 改进根轨迹的快速反射镜控制参量设计[J]. 激光技术, 2017, 41(4): 558-561. AI Zh W, TAN Y, WU Q Y, et al. Design of control parameters for fast steering mirrors by improving root locus[J]. Laser Technology, 2017, 41(4): 558-561 (in Chinese). [4] 叶德茂, 谢利民, 陈晶. 跟踪误差补偿下星地光通信地面模拟实验分析[J]. 激光技术, 2012, 36(3): 346-348. doi: 10.3969/j.issn.1001-3806.2012.03.015 YE D M, XIE L M, CHEN J. Ground simulation analysis of satellite-ground optical communication based on tracking error compensation[J]. Laser Technology, 2012, 36(3): 346-348(in Chinese). doi: 10.3969/j.issn.1001-3806.2012.03.015 [5] 吕世良, 刘金国, 周怀得, 等. 星载红外探测器快速反射镜控制系统设计[J]. 红外与激光工程, 2017, 46(9): 102-107. LV Sh L, LIU J G, ZHOU H D, et al. Design of control system for fast steering mirror of infrared detector based on satellite[J]. Infrared and Laser Engineering, 2017, 46(9): 102-107(in Chinese). [6] 刘奉昌, 李威, 董吉洪, 等. 深空探测相机超轻主支撑结构优化设计[J]. 红外与激光工程, 2019, 48(12): 217-224. LIU F Ch, LI W, DONG J H, et al. Optimal design of the ultra-light main supporting structure of deep space detection camera[J]. Infrared and Laser Engineering, 2019, 48(12): 217-224 (in Chinese). [7] 王正玺, 张葆, 李贤涛, 等. 快速反射镜在像移补偿中的应用[J]. 中国光学, 2020, 13(1): 95-105. WANG Zh X, ZHANG B, LI X T. Application of fast steering mirror in image motion compensation[J]. Chinese Optics, 2020, 13(1): 95-105 (in Chinese). [8] 张兴亮, 王威, 吴佳彬. 激光通信系统中快速反射镜控制技术研究[J]. 半导体光电, 2021, 42(2): 289-294. ZHANG X L, WANG W, WU J B. Research on fast steering mirror control technology of laser communication system[J]. Semiconductor Optoelectronics, 2021, 42(2): 289-294(in Chinese). [9] SHUAI W, JIAO Z, LIANG Y, et al. Development of a direct-drive servo valve with high-frequency voice coil motor and advanced digital controller[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(3): 932-942. [10] KLUK D J, BOULET M T, TRUMPER D L. A high-bandwidth, high-precision, two-axis steering mirror with moving iron actuator[J]. Mechatronics, 2012, 22(3): 257-270. [11] KUIPER S, CROWCOMBE W, HUMAN J, et al. High bandwidth and compact fine steering mirror development for laser communications[C]//17th European Space Mechanisms and Tribology Symposium. New York, USA: IEEE, 2017: 35-42. [12] WITVOET G, KUIPER S, MESKERS A. Performance validation of a high-bandwidth fine steering mirror for optical communications[C]//International Conference on Space Optics-ICSO 2018. New York, USA: IEEE, 2019: 45-52. [13] 陈国真, 徐斯强, 刘品宽, 等. 大行程快速反射镜的结构设计及带宽特性[J]. 光学精密工程, 2020, 28(1): 90-101. CHEN G Zh, XU S Q, LIU P K, et al. Structural design and bandwidth characteristic of a fast steering mirror with large travel range[J]. Optics and Precision Engineering, 2020, 28(1): 90-101(in Chinese). [14] 吴昊. 动磁式音圈电机的开发与应用[D]. 天津: 天津大学, 2017: 12-45. WU H. Development and application of a moving magnet voice coil motor[D]. Tianjin: Tianjin University, 2017: 12-45 (in Ch-inese). [15] 翟荣欣, 谭阳红. 两自由度动磁式音圈电机设计与仿真[J]. 微特电机, 2018, 46(3): 29-31. ZHAI R X, TANG Y H. Design and simulation of two degrees of freedom moving magnet type voice coil actuator[J]. Small & Special Electrical Machines, 2018, 46(3): 29-31 (in Chinese). [16] 黄维康, 黄文新, 曹力, 等. 无线供电式音圈电机的磁路优化设计[J]. 微电机, 2020, 53(6): 6-12. HUANG W K, HUANG W X, CAO L, et al. Optimum design of magnetic circuit of voice coil motor with wireless power supply[J]. Small & Special Electrical Machines, 2020, 53(6): 6-12(in Ch-inese). [17] SHINSHI T, SHIMIZU D, KODEKI K, et al. A fast steering mirror using a compact magnetic suspension and voice coil motors for observation satellites[J]. Electronics, 2020, 9(12): 1997. [18] 王绪硕. 精密指向组件控制参数自整定技术研究[D]. 北京: 北京信息科技大学, 2021: 23-35. WANG X Sh. Research on auto-tuning technology of control parameters of precision pointing components[D]. Beijing: Beijing Information Science and Technology University, 2021: 23-35. [19] LU H, ZHU J, LIN Z, et al. A miniature short stroke linear actuator-design and analysis[J]. IEEE Transactions on Magnetics, 2008, 44(4): 497-504. [20] 曹朔, 张志高, 赵子云, 等. 变形镜用高效率音圈驱动器的结构优化设计[J]. 液晶与显示, 2020, 35(11): 1110-1119. CAO Sh, ZHANG Zh G, ZHAO Z Y, et al. Optimized design of high efficient voice coil actuator in deformable mirror[J]. Chinese Journal of Liquid Crystals and Displays, 2020, 35(11): 1110-1119(in Chinese). [21] AHN D, KIM H, CHOI K, et al. Design process of square column-shaped voice coil motor design for magnetic levitation stage[J]. International Journal of Applied Electromagnetics and Mechanics, 2019, 62(3): 1-24. -

 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 2198
- HTML全文浏览量: 1446
- PDF下载量: 19
- 被引次数: 0
