 网站地图
网站地图


-
激光引信[1-2]是通过激光束探测目标并使用反射回波来探测目标的光学引信,具有抗电磁干扰能力强、空间锐截止特性好和引战配合优良等优点[3],能够很好地提高装备的毁伤能力,因此近些年来备受军方的关注,但激光近炸引信易受到云雾、烟雾等悬浮粒子的干扰而产生虚警,严重时甚至会引起武器早炸或误炸[4]。
激光成像引信[5]是光学引信的一个较新的研究方向,能使引信在几米或几十米的范围内获得目标的几何形状,表面回波强弱等一系列图形信息,可有效降低由云雾、烟雾等悬浮粒子引起的干扰问题,进而提高装备的实用性和适应力,因此,激光成像引信成为了近炸引信[6]研究的重要方向之一。但因为在高速弹目交会状况下,激光成像引信的目标快速识别能力数据量大,数据处理还要达到实时性要求,这也成为了目前激光成像引信发展的技术“瓶颈”之一,国内外学者对此纷纷进行研究,并提出了相关的解决方法。WANG等人[7]利用形态学的处理办法获取形态点特征并进行目标识别。WEI等人[8]利用角点与矩形度结合的方式来区分目标与云雾干扰。WANG等人[9]通过基于加速稳健特征(speeded up robust features,SURF)的目标渐进识别算法实现飞机目标的识别。
激光成像引信所成像大多为弹目交会姿态复杂的局部图像,图像信息较少,基于角点特征的目标识别方法能利用较少的图像信息较为准确地识别目标,并且适应性强、识别速度快。为了进一步提高识别速度,本文中提出了一种改进角点特征提取算法和矩形度相结合的方式来区分目标与云雾。根据改进角点特征提取算法对图像进行提取,若角点数大于等于设定角点数量阈值,则计算矩形度;若矩形度大于等于设定矩形度阈值,则该图像为目标,否则为干扰。
-
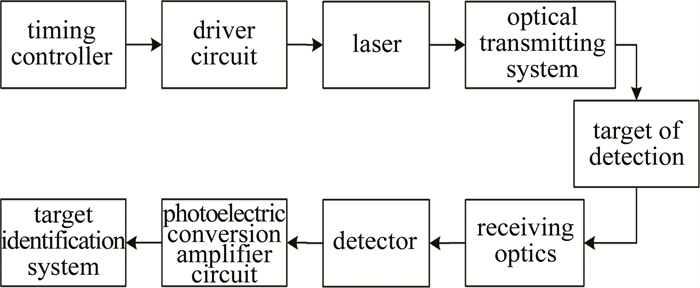
激光成像引信发射激光束照射目标,得到目标的几何形状、表面回波强弱等目标图像信息,同时生成整个或部分的目标强度图像,最后利用目标的图像特征来实现目标识别并判定区分目标与干扰,该方式可以有效增强激光引信的抗自然干扰能力,满足对实时性和目标识别精准性的要求。激光成像引信由以下两部分组成,其系统框图如图 1所示。

图 1 激光成像引信系统框图
Figure 1. Block diagram of laser imaging fuze system
激光成像探测系统主要由发射与接收系统、时序控制电路三部分组成[10]。
通常激光成像引信使用推扫式探测激光引信。该方式利用线性阵列器件的本身结构完成横向扫描,利用导弹的飞行完成纵向扫描,从而得到目标的2维图像[11]。根据所得图像获取到丰富的几何形状信息、外形轮廓和表面特征,从而有效地进行目标与干扰的识别。为了给目标图像识别提供充足的时间,扫描成像探测激光引信采用前倾发射、前倾接收方式,发射、接收视场与弹轴成锐角[12]。
-
推扫式激光成像引信成像由于其探测原理从而具有以下特点[13]:(1)多种姿态成像。由于弹目交会时呈现多种交会姿态,同一个目标角度、远近等不同都会使目标图像发生旋转和扭曲等问题,导致每次获取的目标图像各式各样,给目标识别带来了很大的困难; (2)局部性和实时性。推扫式成像是积累行数逐渐生成的,说明只有积累到一定时间内才能获得完整图像。但弹目交会时间很短暂,基本都在几毫秒到十几毫秒之间,这就对目标识别算法要求十分严苛,算法必须要简单,满足实时性要求。
-
激光成像引信所成的像大多是局部的2维图像,因此只能利用局部特征来对目标与干扰进行区分。角点是图像中各个方向上灰度值变化较剧烈的点,包含了丰富的局部特征信息,可以很好地描述图像局部特征[14],而且由于角点中含有很少的数据量,因此通过角点来进行目标识别可以有效地减少运算量,降低计算时间,从而满足图像处理的实时性。经典的Harris检测算法[15-17]就是通过寻找图像中灰度变化剧烈的极大值来确定角点。
-
Harris角点检测是图像灰度的检测算法,该方法首先计算灰度图像水平和垂直方向上的梯度,并根据梯度以及梯度的乘积计算出协方差矩阵M,其次根据协方差矩阵M计算得到角点响应函数,如果它的值大于设定的阈值,则判断像素点是角点,最后在一定大小的窗口内通过非极大值抑制来确定最终角点。Harris角点检测公式如下:
$ \begin{gathered} E(u, v)=\sum\limits_{x, y} w(x, y)[I(x+u, y+v)- \\ I(x, y)]^2=\sum\limits_{x, y} w(x, y)\left[I_x u+I_y v+\right. \\ \left.o\left(u^2, v^2\right)\right]^2=[u\;v] \boldsymbol{M}\left[\begin{array}{l} u \\ v \end{array}\right] \end{gathered} $
(1) 其中:
$ \boldsymbol{M}=\sum\limits_{x, y} w(x, y)\left[\begin{array}{ll} I_x{ }^2 & I_x I_y \\ I_x I_y & I_y{ }^2 \end{array}\right] $
(2) 式中,w(x, y)函数表示窗口函数,在该算法中为高斯函数;I(x+u, y+v)和I(x, y)分别表示像素坐标位置(x+u, y+v)和(x, y)处的像素灰度值;Ix和Iy分别表示像素灰度在x方向和y方向上的梯度值;Ix2和Iy2分别表示在x方向和y方向上梯度值的乘积,协方差矩阵M也可以称为偏导数矩阵,根据M的特征值确定角点响应函数FCR值,公式为:
$ F_{\mathrm{CR}}=\operatorname{det} \boldsymbol{M}-k(\operatorname{tr}(\boldsymbol{M}))^2 $
(3) 式中,det M是矩阵M的行列式,tr(M)是矩阵M的迹,k的取值范围为[0.04, 0.06],由于该公式中k的取值对结果可能有一些影响在此使用改进的公式:
$ F_{\mathrm{CR}}=\frac{I_x{ }^2 \cdot I_y{ }^2-\left(I_x \cdot I_y\right)^2}{\left(I_x{ }^2+I_y{ }^2\right)} $
(4) Harris算法可以有效地检测出图像角点,但存在运行速度慢、不具有尺度不变性和阈值较难设定等缺点,针对这些问题,提出改进的Harris+最小核值相似区域(smallest univalue segment assimilating nucleus,SUSAN)特征检测算法。
-
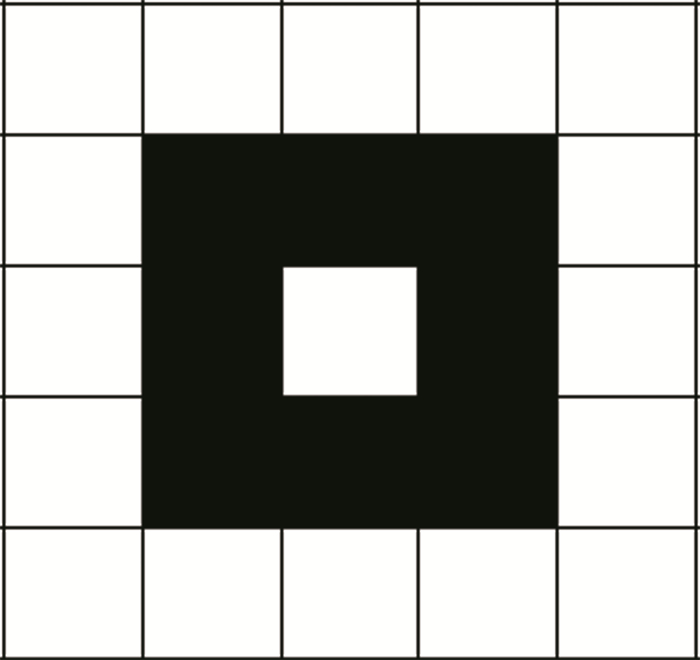
为了提高角点检测的速率,减少一些不必要的计算,改进算法在计算角点响应函数前首先完成初始角点的筛选,在筛选过程中借鉴SUSAN算法[18]的思想,利用8邻域模板(如图 2所示)取代SUSAN算法中的36圆形模板。

图 2 8邻域模板
Figure 2. 8-neighborhood template
传统SUSAN算法中灰度差阈值通常通过经验取一个固定阈值,但固定的灰度差阈值难以适应图像内部之间的差异,因此,在改进算法中采用8邻域模板的标准差作为自适应灰度差阈值t,将模板在图像上滑动,计算模板与每个像素点灰度差的绝对值的同时与阈值t比较,判断是否属于核值相似区域(univalue segment assimilating nuclues,USAN),统计相似的像素个数n(x, y),公式如下所示:
$ c(u, v)=\left\{\begin{array}{l} 1, (|I(u, v)-I(x, y)| \leqslant t) \\ 0, (|I(u, v)-I(x, y)|>t) \end{array}\right. $
(5) $ n(x, y)=\sum c(u, v) $
(6) 式中,c(u, v)为模板中属于SUSAN区域的像素判别函数,I(u, v)为模板各点的像素灰度值。当n(x, y)=0时,说明该像素点为孤立点或者噪声点;当n(x, y)=5时,说明该像素点处于边缘处;当n(x, y)=1~4时,说明该像素点是初始角点,其余情况下都是非角点。
Harris算法根据曲率值来判断角点,因此不具备尺度不变性。HUANG采用小于阈值t的USAN的倒数作为角点响应函数(corner response function, CRF)改正因子P来纠正Harris算法对尺度变化敏感的问题[19]。
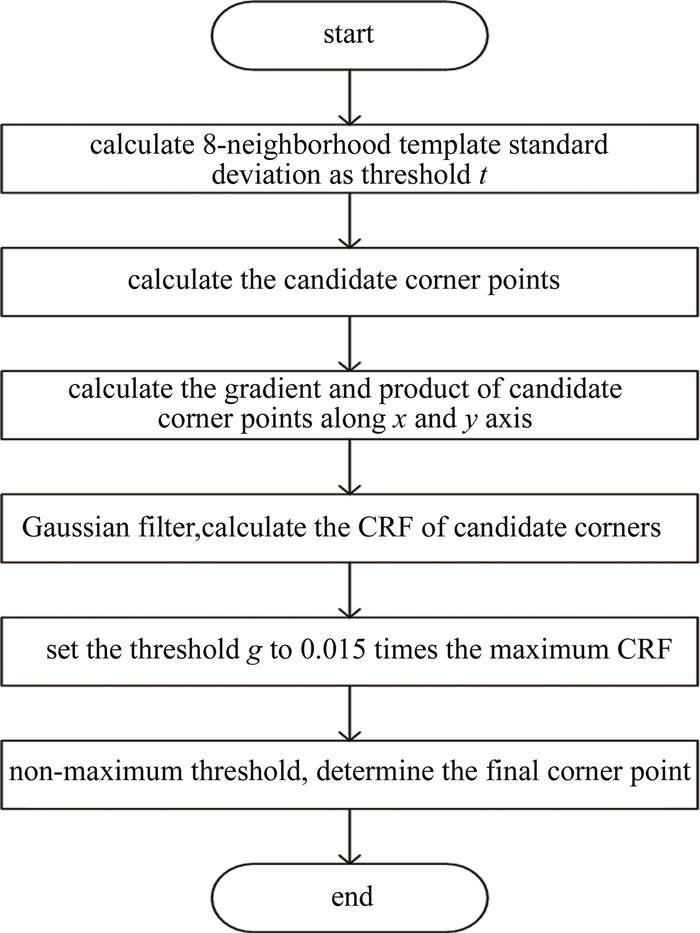
改进的Harris算法流程图如图 3所示。其中阈值g为角点响应函数最大值的m倍,m的取值范围为[0.005, 0.015],在这个范围内会检测出较为准确的角点。

图 3 改进算法流程图
Figure 3. Improved algorithm flow chart
首先计算目标像素点上的8邻域模板标准差作为自适应阈值t,将模板与中心像素点灰度差的绝对值与阈值t进行比较,通过统计目标图像中每个像素点的相似像素数目筛选出候选角点,这样可以有效减少Harris算法运行时间;其次计算每个候选角点在x轴和y轴方向上的梯度乘积,并在一定尺寸的窗口内进行高斯滤波,利用改进的角点响应函数公式计算候选角点的角点响应函数值;最后设置阈值g,若角点响应函数小于g,则将其置为零,并在3×3的窗口内进行非极大值抑制,从而得到最终角点。
-
矩形度表现的是物体对其最小外接矩形[20]的充满程度,公式如下:
$ R=S_0 / S_{\mathrm{MER}} $
(7) 式中,S0是目标图像的面积,SMER是最小外接矩形的面积,R的值是[0, 1]。由于云雾干扰具有分散性和不确定性,其最小外接矩形越大,则矩形度越小,目标飞机越集中;其最小外接矩形越小,矩形度越大,目标飞机越分散。因此,可以通过矩形度对目标与云雾进行区分排除。
-
采用相关软件对某飞机模型和云雾进行仿真模拟得到多种姿态下的战机2维图形,通过对其采用改进Harris角点检测算法进行仿真分析得出:(1)当检测到目标为战机时,若为迎头交会时最先扫描到的是机头,其次是机身和机翼,最后是尾翼;若为追尾交会时最先扫描到的是尾翼,其次是机身和机翼,最后是机头;在弹目交会过程中,尾翼、机翼和机头处都有明显的角点处,则在目标识别过程中很容易被识别出来;(2)当检测到目标为云雾等微小悬浮粒子时,由于其矩阵信息多为随机、孤立的少量干扰点,所以在进行角点提取过程中几乎没有角点能被提取到。
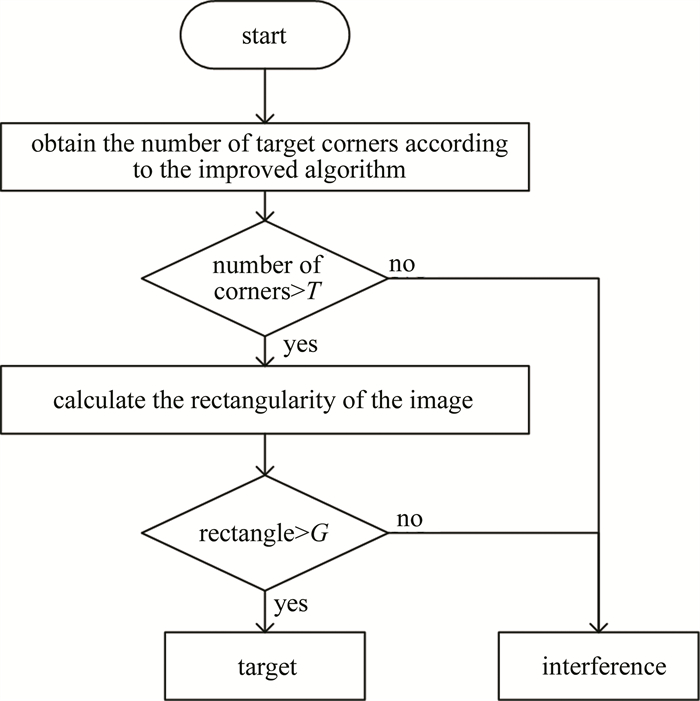
通过角点检测算法可以区分一部分目标和干扰,但为了更精准地识别出目标,还需要通过矩形度对目标与干扰做进一步的区分,具体流程图如图 4所示。其中对大量的目标与干扰的角点数量进行统计分析得到阈值T,对大量的目标与干扰的矩形度进行统计分析得到阈值G。

图 4 目标识别流程图
Figure 4. Flow chart of target recognition
-
通过采用相关软件仿真模拟得到多种姿态下的某飞机模型和云雾的2维图形,通过改进算法对其进行仿真分析研究。
-
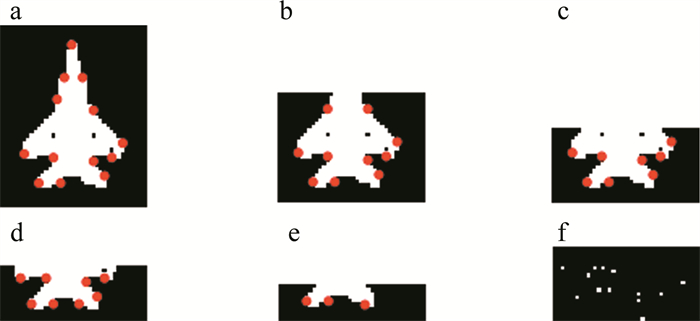
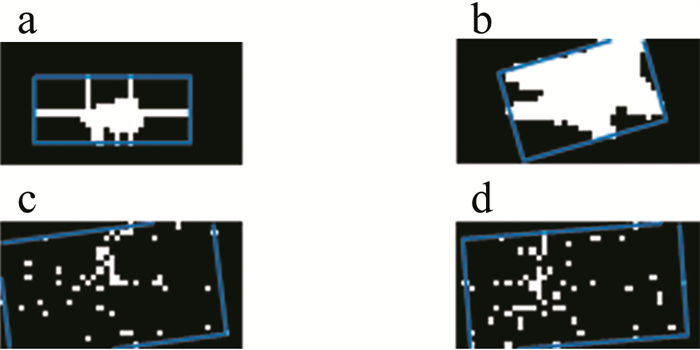
由于弹目交会速度要求非常高,目标识别必须在成像过程中完成,即在产生局部图形时就应对其进行目标识别。为了验证该方法的可行性,在相同的飞行姿态下,对扫描行数不同的图像进行角点提取,某飞机模型与云雾的角点分布图如图 5所示。

图 5 某飞机模型与云雾的角点分布图
Figure 5. Distribution of angular points between fighters and clouds
表 1中对图 5中不同行数的某飞机模型进行详细说明。由表 1可知,随着扫描行数的不断增加,检测的角点数量也逐渐增加,扫描行数为50行时,能够得到完整的飞机图像,但运行时间相对较久;扫描行数为10行时,可以得到尾翼图像,虽然运行时间短,但角点数量较少,包含的图像信息太少;而当扫描行数为20行时,能得到尾翼、机身和机翼图像,可以用较少的运行时间获取较多的图像信息。因此在后续的仿真实验中,采用扫描行数为20行的图像进行验证分析。表 2为扫描行数为20行时云雾的角点数量和运行时间分析。对云雾进行仿真分析时发现,在多次角点提取过程中几乎没有角点被提取到,证明该方法可以对云雾和目标进行初步的区分。
表 1 某飞机模型在不同行数下的角点数量
Table 1. Number of corner points of fighters in different rows
表 2 扫描行数为20时云雾的角点数量
Table 2. Number of corner points of the cloud and fog at the 20 th time of the scanning behavior
image size scan lines number of corners running time/s corner distribution 20×40 20 0 0.1270 Fig. 5f 表中显示的运行时间都是计算机运行时间,仅靠软件并不能满足实时性的要求,硬件实现可以采用现场可编程门阵列(field-programmable gate array,FPGA)芯片,它的运行速率大约是100 MHz。本文中提出的改进的角点检测算法最多约20000条指令,假设每条指令的处理时间是10 ns,在FPGA上运行该算法需要0.2 ms,而弹目交会时间基本在几毫秒到十几毫秒之间,在FPGA上运行满足实时性要求。
对交会姿态图像及云雾图像进行仿真提取角点,角点分布图如图 6所示,并在表 3中说明。通过对角点数量统计分析可以得到阈值T=1,当角点数量大于T时,可以初步认为是某飞机模型,反之为云雾,部分仿真结果如表 3所示。当云雾浓度较低时,云雾几乎不能提取到角点,与某飞机模型的角点数量相差较大。因此当角点数量为0时,可直接判定为云雾,否则需要下一步判断才能确定。

图 6 某飞机模型角点分布
Figure 6. Distribution of angle points of fighters
-
角点数量可以排除云雾浓度较低时的部分干扰,但随着云雾浓度逐渐升高可能出现云雾的角点数量大于阈值T的现象,为了提高激光成像引信目标识别的准确性,还需采用矩形度对角点数量大于阈值T的图像做进一步判断。大量仿真计算发现,云雾的矩形度远小于某飞机模型的矩形度,对矩形度统计分析后取阈值G=10%,当矩形度大于阈值G时,可以确定为某飞机模型,反之为云雾。图 7为部分图形的最小外接矩形图,部分仿真结果如表 4所示。在角点数量大于阈值T情况下,当矩形度小于阈值G时,可直接判定为云雾,反之则为某飞机模型。

图 7 某飞机模型和云雾的最小外接矩形
Figure 7. Minimum circumscribed rectangle of fighters and clouds
表 4 某飞机模型和云雾的矩形度分析
Table 4. Analysis of the rectangularity of fighters and clouds
对不同浓度的云雾仿真时发现,云雾浓度较低时,角点数量或矩形度可以满足阈值要求,从而准确地对目标与云雾干扰进行区分,但随着云雾浓度逐渐升高,角点数量和矩形度也逐渐增加,当角点数量大于阈值T且矩形度大于阈值G时,不能准确区分目标与云雾干扰,导致判定错误从而产生误差。通过对100种不同姿态、不同角度的战机模型和不同浓度云雾进行仿真分析,结果表明,95%的目标能被有效地识别出来,在目标识别速度和准确度上都有所提高。
-
采用改进Harris算法和矩形度结合的方式对目标与云雾、烟雾等悬浮粒子进行区分,该方法首先对生成图形采用Harris+SUSAN角点检测算法提取角点,根据角点数量对目标与悬浮粒子进行初步的判断,其次利用矩形度进行目标与悬浮粒子的二次筛选,其中仿真所用的某飞机模型的局部图像是使用软件模拟得到的。通过仿真分析可知,改进角点检测算法和矩形度相结合可以快速准确地区分目标和云雾、烟雾等悬浮粒子干扰,满足复杂环境实时性与准确性的需要。不足之处是,目前只在理论上证明该算法写入硬件后运行满足实时性要求,并未实际操作研究,在后续的研究中将尝试在FPGA上进行实现分析。
激光成像引信的目标识别方法研究
Target recognition method of laser imaging fuze
-
摘要: 为了高效准确地滤掉云烟雾等悬浮粒子, 减少对激光成像引信工作的影响, 采用了改进的Harris+最小核值相似区域(SUSAN)角点检测算法与矩形度结合的目标识别方法。改进算法在原有Harris和SUSAN算法基础上, 利用8邻域模板标准差对目标像素点进行初次筛选获得候选角点, 经高斯滤波后, 利用改进的角点响应函数值进行二次筛选, 再通过非极大值抑制得到最终角点, 最后利用矩形度对目标与干扰进行二次区分。通过理论分析和实验验证可知, 95%的目标能被有效地识别出来。结果表明, 该方法能高效准确地区分目标与干扰, 同时满足实时性要求, 为激光成像引信抗干扰方面提供了一定的理论参考。
-
关键词:
- 激光技术 /
- 目标识别 /
- 特征提取 /
- Harris算法 /
- 最小核值相似区域算法
Abstract: In order to efficiently and accurately filter out the influence of suspended particles such as cloud smoke on laser imaging fuze, a target recognition method based on the combination of improved Harris+ smallest univalue segment assimilating nucleus (SUSAN) corner detection algorithm and rectangularity was proposed. Based on the original Harris and SUSAN algorithms, the 8-neighborhood template standard deviation was used to perform the initial screening of target pixels to obtain candidate corner points, and after Gaussian filtering, the improved corner point response function value was used for secondary screening, and then the final corner point was obtained by non-maximum suppression, and finally the target and interference were quadratically distinguished by the rectangularity. Through theoretical analysis and experimental verification, 95% of the targets can be effectively identified. The results show that the proposed method can efficiently and accurately distinguish between target and interference, while meeting the real-time requirements, and provides a theoretical reference for the anti-interference of laser imaging fuze. -
图 5 某飞机模型与云雾的角点分布图
Figure 5. Distribution of angular points between fighters and clouds
表 2 扫描行数为20时云雾的角点数量
Table 2. Number of corner points of the cloud and fog at the 20 th time of the scanning behavior
image size scan lines number of corners running time/s corner distribution 20×40 20 0 0.1270 Fig. 5f  下载: 导出CSV
下载: 导出CSV
表 3 某飞机模型和云雾的角点数量分析
Table 3. Analysis of the number of corner points of fighters and clouds
下载: 导出CSV
-
[1] 牛长孟. 远距离激光周视探测系统关键技术研究[D]. 济南: 齐鲁工业大学, 2021: 1-13. NIU Ch M. Research on the key technology of long-distance circumferential detection system[D]. Ji'nan: Qilu University of Technology, 2021: 1-13(in Chinese). [2] 吴越, 黄中华, 过凯, 等. 激光引信无源干扰技术发展及应用研究[J]. 光电技术应用, 2021, 36(4): 1-4. doi: 10.3969/j.issn.1673-1255.2021.04.002 WU Y, HUANG Zh H, GUO K, et al. Research on development and application of laser fuze passive jamming technology[J]. Electro-Optic Technology Application, 2021, 36(4): 1-4 (in Chinese). doi: 10.3969/j.issn.1673-1255.2021.04.002 [3] 李乐堃, 李源, 高宠, 等. 窄脉冲激光引信对云雾中目标的回波特性研究[J]. 航空兵器, 2021, 28(5): 106-109. LI L K, LI Y, GAO Ch, et al. Study on echo characteristics of narrow pulse laser fuze on targets in cloud[J]. Aero Weaponry, 2021, 28(5): 106-109(in Chinese). [4] 陈慧敏, 马超, 齐斌, 等. 脉冲激光引信烟雾后向散射特性研究[J]. 红外与激光工程, 2020, 49(4): 38-44. CHEN H M, MA Ch, QI B, et al. Study on backscattering characte-ristics of pulsed laser fuze in smoke[J]. Infrared and Laser Engineering, 2020, 49(4): 38-44(in Chinese). [5] 陈鹏, 赵继广, 宋一铄. 激光近距探测抗气溶胶干扰方法研究进展[J]. 兵器装备工程学报, 2020, 41(8): 228-233. CHEN P, ZHAO J G, SONG Y Sh. Research progress on anti-aerosol interference methods for laser proximity detection[J]. Journal of Ordnance Equipment Engineering, 2020, 41(8): 228-233(in Chinese). [6] 任宏光, 张好军, 孙毓凯, 等. 激光近距探测装置抗云雾干扰研究[J]. 红外与激光工程, 2020, 49(4): 29-37. REN H G, ZHANG H J, SUN Y K, et al. Study on techniques of anti-aerosol-interference for active optical target-detection device[J]. Infrared and Laser Engineering, 2020, 49(4): 29-37(in Chinese). [7] 王刚, 贺伟, 董卫斌, 等. 一种基于形态点特征的目标识别方法[J]. 探测与控制学报, 2010, 32(6): 18-22. WANG G, HE W, DONG W B, et al. Target identification based on morphological point feature[J]. Journal of Detection & Control, 2010, 32(6): 18-22(in Chinese). [8] 卫媛媛, 贺伟. 快速区分目标与云雾的方法研究[J]. 弹箭与制导学报, 2014, 34(2): 177-181. WEI Y Y, HE W. A method for quick distinguishing between target and clouds[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2014, 34(2): 177-181(in Chinese). [9] 王小驹, 马珩, 张顺法. 一种适用于空空导弹的激光灰度成像引信技术[J]. 红外与激光工程, 2018, 47(3): 37-43. WANG X J, MA H, ZHANG Sh F. Laser gray imaging fuze technology for air-to-air missile[J]. Infrared and Laser Engineering, 2018, 47(3): 37-43(in Chinese). [10] TANG Q, HE W. Target recognition method of laser imaging fuze based on deep transfer learning[C]//2021 the 3rd International Conference on Natural Language Processing (ICNLP). Beijing, Ch-ina: ICNLP, 2021: 202-207. [11] 孙志慧, 邓甲昊, 闫小伟. 线阵推扫式激光成像引信探测技术[J]. 光电工程, 2009, 36(3): 16-21. SUN Zh H, DENG J H, YAN X W. Linear array push-broom method in laser imaging fuze detection technology[J]. Opto-Electronic Engineering, 2009, 36(3): 16-21(in Chinese). [12] 刘博虎, 宋承天, 段亚博. 周视激光成像引信设计及仿真[J]. 红外与激光工程, 2018, 47(4): 147-154. LIU B H, SONG Ch T, DUAN Y B. Design and simulation of a panoramic laser imaging fuze[J]. Infrared and Laser Engineering, 2018, 47(4): 147-154(in Chinese). [13] 董康生, 曹林平, 韩统, 等. 激光成像引信在空空导弹中的应用[J]. 空军工程大学学报(自然科学版), 2013, 14(2): 42-46. DONG K Sh, CAO L P, HAN T, et al. Application research on laser imaging fuze in air-to-air missiles[J]. Journal of Air Force Engineering University(Natural Science Edition), 2013, 14(2): 42-46(in Chinese). [14] 朱思聪, 周德龙. 角点检测技术综述[J]. 计算机系统应用, 2020, 29(1): 22-28. ZHU S C, ZHOU D L. Review on image corner detection[J]. Computer Systems & Applications, 2020, 29(1): 22-28(in Chinese). [15] 杨佳豪, 董静静, 袁彤, 等. 一种基于图像邻域灰度变化的角点检测改进方法[J]. 纺织高校基础科学学报, 2019, 32(3): 337-344. YANG J H, DONG J J, YUAN T, et al. An improved corner detection method based on grayscale changes of image neighboring[J]. Basic Sciences Journal of Textile Universities, 2019, 32(3): 337-344(in Chinese). [16] 汪海洋, 陈德林, 帅一师, 等. 基于灰度差预处理的改进Harris角点检测算法[J]. 电子技术与软件工程, 2019, 8(9): 72-73. WANG H Y, CHEN D L, SHUAI Y Sh, et al. Improved Harris corner detection algorithm based on gray difference preprocessing[J]. Electronic Technology & Software Engineering, 2019, 8(9): 72-73(in Chinese). [17] YU W B, WANG G X, LIU Ch, et al, An algorithm for corner detection based on contour[C]// 2020 Chinese Automation Congress (CAC). Shanghai, China: CAC, 2020: 114-118. [18] 崔乐, 李春, 李英. Harris算法和SUSAN算法的实现及分析[J]. 计算机与数字工程, 2019, 47(10): 2396-2401. CUI L, LI Ch, LI Y. Implementation and analysis of harris algorithm and SUSAN algorithm[J]. Computer & Digital Engineering, 2019, 47(10): 2396-2401(in Chinese). [19] 黄晓浪. 基于灰度变化的角点检测算法研究[D]. 南昌: 东华理工大学, 2019: 21-34. HUANG X L. Research on the corner detection algorithms based on gray change[D]. Nanchang: East China University of Technology, 2019: 21-34(in Chinese). [20] JIANG Y. Research on scanning imaging technology of terminal-sensitive missile-borne lidar[D]. Nanjing: Nanjing University of Science and Technology, 2020: 49-61(in Chinese). -

 点击查看大图
点击查看大图
图(7) / 表(4)
计量
- 文章访问数: 2221
- HTML全文浏览量: 1480
- PDF下载量: 17
- 被引次数: 0
