 网站地图
网站地图

 下载:
下载:




-
激光具有能量集中、方向性好、发散度小等优点[1],在激光刻蚀、激光切割、打孔等半导体加工领域得到了广泛的应用。激光加工是通过控制激光光斑中心与待加工物体的相对位置来完成的,精确定位激光光斑中心是激光加工定位控制系统的关键技术。
目前,激光光斑中心定位主要有基于光斑图像边缘的定位和基于光斑图像灰度的定位两种方法[2],前者适用于光斑图像边缘较清晰的目标,后者适合光斑图像边缘存在大量噪声的情况。传统的基于光斑图像灰度的定位算法有最大行列灰度值法、灰度重心法等。半导体实际加工过程中,由于激光会出现衍射、散射等现象,以及半导体材料表面存在反射不均匀等影响,导致图像中光斑图案形状不规则,且存在大量随机噪声,传统定位算法的精度难以达到要求,且抗干扰能力较差[3]。因此,研究提高基于光斑图像灰度的定位算法的精度具有重要的工程实际意义。
近年来,国内外许多学者开展了激光光斑中心定位算法研究[4-8]。参考文献[9]中提出一种基于高斯曲线拟合的激光中心高精度定位算法,首先使用传统定位算法进行粗定位,然后利用高斯曲线拟合算法进行进一步的精定位,提高了激光光斑中心定位精度,但该算法只适合光斑图像灰度符合高斯分布的情况。参考文献[10]中使用加权插值的方法对激光光斑进行中心定位,不仅提高了定位结果的精度和稳定性,还可以进行光斑边缘的精确定位,但该算法计算复杂且容易受到光斑内饱和像元的影响。参考文献[11]中采用边缘阈值法消除随机误差,并提出了一种基于非线性最小二乘拟合算法补偿系统误差,将定位精度提高至0.12 pixel。参考文献[12]中提出一种以亚像素精度测量图像传感器获取图像中光点质心位置的算法,应用于卫星激光通信中精确定位激光指向,但该算法默认激光光斑呈理想的艾里斑图案。参考文献[13]中提出一种利用并行层次网络预测激光束图像能量中心的方法,采用并行层次网络对激光视频数据进行快速转换、分类和预测,筛选出高质量帧,提高了激光能量中心定位精度,但该方法需要逐帧处理激光视频,计算量庞大,传统的个人计算机无法进行实时处理。由于皮秒量级的超短脉冲激光辐照单晶硅后产生的光斑图像灰度不符合高斯分布,也不属于艾里斑图案,且存在大量随机噪声,因此上述算法不适用于皮秒超短脉冲激光中心定位。
针对皮秒超短脉冲激光辐照单晶硅后产生的光斑图像灰度分布特点,本文中提出了一种基于灰度直方图的激光光斑中心定位算法。首先通过激光光斑图像的灰度直方图进行自适应阈值计算,并对图像进行阈值分割,使分割后图像中目标图案灰度分布比较均匀,且呈现整体的对称性,然后使用灰度重心法计算目标图案的重心并以此作为激光中心。仿真和实验验证了该算法的定位精度优于传统算法。
-
传统的激光光斑中心定位算法有灰度重心法[14]和最大行列灰度值法。假设一幅图像大小为M pixel×N pixel,像素(i,j)处的灰度值为I(i,j),目标图案中心坐标为(xc,yc)。灰度重心法的原理是:
$ {x_{\rm{c}}} = \sum\limits_{i = 0}^{M - 1} {\sum\limits_{j = 0}^{N - 1} I } (i, j) \times i/\sum\limits_{i = 0}^{M - 1} {\sum\limits_{j = 0}^{N - 1} I } (i, j) $
(1) $ {y_{\rm{c}}} = \sum\limits_{i = 0}^{M - 1} {\sum\limits_{j = 0}^{N - 1} I } (i, j) \times j/\sum\limits_{i = 0}^{M - 1} {\sum\limits_{j = 0}^{N - 1} I } (i, j) $
(2) 式中,i=0,1,2,…,M-1;j=0,1,2,…,N-1。灰度重心法计算简单,速度较快,定位精度一般在1 pixel以内,适用于精度和实时性要求较高的场合[15]。由于该算法考虑了光斑灰度图像中的全部像素,因此抗单点噪声的能力较强。灰度重心法的缺点是只能针对形状规则且灰度对称的光斑,否则会出现较大误差。
最大行列灰度值法的原理是:
$ \left\{ {\begin{array}{*{20}{l}} {{x_{\rm{c}}} = \min \left( {\sum\limits_{i = 0}^{M - 1} I (i, j)} \right)}\\ {{y_{\rm{c}}} = \min \left( {\sum\limits_{j = 0}^{N - 1} I (i, j)} \right)} \end{array}} \right. $
(3) 最大行列灰度值法计算简单,在处理光斑灰度呈高斯分布的图像时效果很好,但是当光斑图像的灰度不符合高斯分布时会产生较大误差。
-
脉冲激光加工半导体材料时,为了达到加工效果,激光能量须达到材料的损伤阈值,使材料表面的热效应积累达到熔点并使其完全熔化。
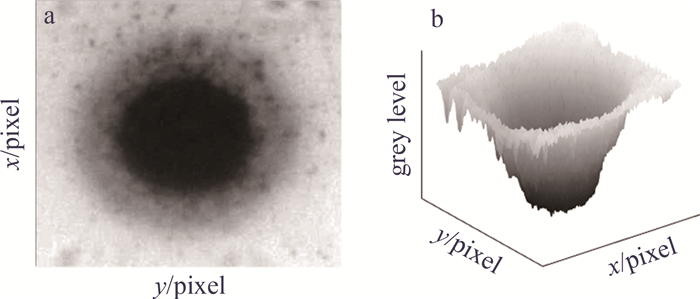
在皮秒超短脉冲激光辐照单晶硅过程中,产生的光斑图像灰度不符合2维高斯分布,存在“平顶”现象,即光斑中心部分的灰度值最低且集中在一定范围内,如图 1所示。图中“毛刺”由噪声引起,原因是激光束中心部分的能量较高,达到了单晶硅的损伤阈值,且由于存在热效应积累,材料表面已完全融化,因此光斑图像中心区域的平均灰度值最低。而激光束外围的能量已经衰减至达不到单晶硅的损伤阈值,材料未完全熔化,因此图像灰度值更高。此外,在激光辐照过程中,中心部分单晶硅熔化产生的熔渣会四处飞溅,导致光斑外围存在大量随机噪声。

图 1 皮秒激光光斑的灰度分布图
Figure 1. Gray scale distribution of picosecond laser spot
基于上述分析,采用最大行列灰度值法和灰度重心法对皮秒超短脉冲激光光斑图像进行中心定位时,将存在较大误差。
本文中基于传统的灰度重心法,提出一种基于灰度直方图的激光光斑中心定位算法,算法流程图如图 2所示。首先通过电荷耦合元件(charge-coupled device,CCD)相机采集激光光斑图像,然后选取光斑所在区域为感兴趣区域(region of interest,ROI),计算图像的灰度直方图,并以直方图中第1个峰值所对应的灰度值作为阈值对光斑图像进行自适应阈值分割,最后使用灰度重心法计算光斑中心。

图 2 算法流程图
Figure 2. Algorithm flow chart
-
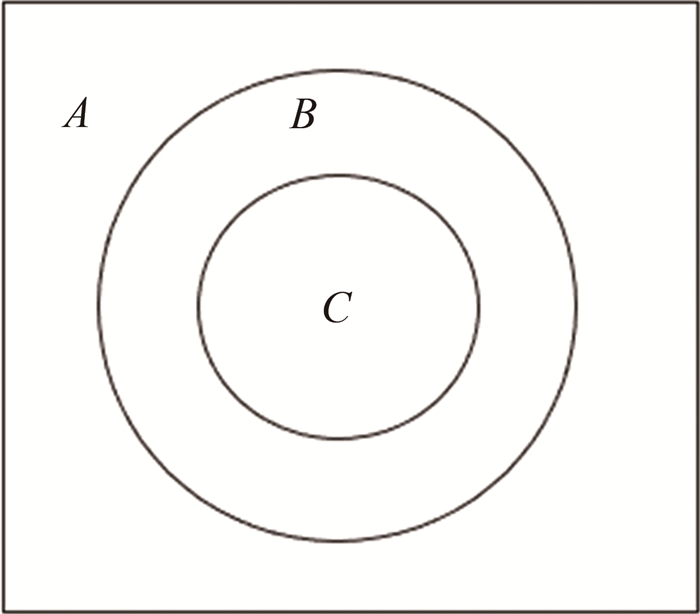
本文中将获取的激光光斑图像分为3个部分,如图 3所示。其中A区域是图像的背景,即激光束以外的区域;B区域是由于激光能量不足导致材料未被完全损伤的部分,并且由于中心区域单晶硅熔化产生的熔渣飞溅会导致该区域存在大量随机噪声;C区域是激光光斑中心部分,是单晶硅完全融化的区域,因此平均灰度值最低。

图 3 激光光斑图像划分示意图
Figure 3. Schematic diagram of laser spot image division
当激光功率和辐照时间一定时,每次激光辐照单晶硅后产生的光斑大小和灰度分布都有差异。其中,A区域的大小主要与激光光斑的整体大小和ROI的选择有关。B区域的大小及灰度分布存在随机性,与环境以及材料的制造差异有关。只有C区域大小相对固定,且灰度分布也比较均匀,因此可以通过设定阈值来分割光斑图像的C区域与其它部分,单独对这一区域使用灰度重心法进行计算。
-
阈值的设定有两种方式,一种是固定阈值,即采用同一阈值对图像进行阈值分割,该阈值通常由事先测定得到,但在实际加工过程中存在不确定性,每次产生的光斑图像灰度分布是不同的,固定阈值在实际应用中并不常用。另一种方式是自适应阈值,根据每次图像灰度分布的不同进行相应的阈值计算,这种方式不仅具有较强的灵活性,还可以提高激光光斑图像分割性能[16]。最常用的自适应阈值算法是大津法,大津法的原理是:根据阈值t可将一幅图像中的像素分为背景Cb和前景Cf两类,能使前景与背景的类间方差最大的阈值为最佳阈值。类间方差σb2可用下式计算[17]:
$ \sigma_{\mathrm{b}}^2=p_{\mathrm{b}}(t)\left[1-p_{\mathrm{b}}(t)\right]\left[\mu_{\mathrm{b}}(t)-\mu_{\mathrm{f}}(t)\right]^2 $
(4) 式中,pb(t)为背景像素占图像中全部像素的比例,μb(t)和μf(t)分别为背景像素和前景像素的平均灰度值。
当类间方差取得最大值时的阈值t0为:
$ t_0=\operatorname{argmax}\left(\sigma_{\mathrm{b}}^2\right), (0 \leqslant t \leqslant L-1) $
(5) 式中,L为图像的灰度级。
大津法原理简单、计算速度快,对图像亮度和对比度的要求不高,是图像处理领域常用的自适应阈值分割算法之一,但该算法抗噪声干扰能力较差。由前面的可知,半导体激光加工中,光斑图像上存在大量随机噪声,因此大津法在此并不适用。
本文中提出一种基于图像灰度直方图的自适应阈值计算方法,图像灰度直方图是表示图像灰度分布的直方图,其纵坐标代表的是图像中每个灰度值对应的像素总数。通过计算光斑图像的灰度直方图,可以看出其整体的灰度分布,从而找到C区域对应的灰度值。
假设一幅灰度图像的大小为M pixel×N pixel,灰度空间为0~255,(i,j)处的灰度值为I(i,j),图像灰度直方图函数的定义为:
$ H(k) = \frac{1}{{M \times N}}\sum\limits_{i = 0}^{M - 1} {\sum\limits_{j = 0}^{N - 1} {{\delta _{i, j}}} } (k) $
(6) 式中,H(k)代表图像中灰度值为k的像素总数量,k∈(0~255);$ \delta_{i, j}(k)=\left\{{array}{l} 1, (I(i, j)=k) \\ 0, (\text { else }) {array}\right.$。
-
根据前面分析的激光光斑图像灰度分布特点,C区域的平均灰度值最低,且像素数量较多,在直方图中表现为第一个峰值所对应的灰度值,以此灰度值作为阈值Ith,按照下式对光斑图像进行阈值分割:
$ I(i, j)=\left\{\begin{array}{l} I(i, j), \left(I(i, j) \leqslant I_{\mathrm{th}}\right) \\ 255, \left(I(i, j)>I_{\mathrm{th}}\right) \end{array}\right. $
(7) 与大津法相比,通过灰度直方图进行阈值分割之后的图像更接近光斑中心部分,有效地剔除了噪声的影响,图像的灰度分布也比较均匀且呈现整体的对称性,再对目标图案使用灰度重心法求中心,求得的结果具有更高的精确度。
-
为了验证所提出算法的有效性,本文中通过模拟激光光斑仿真分析,对比研究了该算法与传统算法的定位精度。
根据实际激光光斑图像的灰度分布特点,利用下式生成了模拟激光光斑灰度图像:
$ \begin{gathered} I(i, j)= \\ \operatorname{rang}\left(I_0-A \exp \left[\frac{\left(i-x_0\right)^2}{2 \sigma_i^2}-\frac{\left(j-y_0\right)^2}{2 \sigma_j^2}\right]\right) \end{gathered} $
(8) 式中,(x0,y0)为理想的中心坐标;σ为2维高斯函数的标准差,在一定范围内设置不同的标准差,可以生成不同的光斑;I0=200和A=150是根据实际激光光斑灰度图分析后得出的经验值;rang()函数是将灰度值小于阈值的像素点的灰度设置为一固定值,作用是模拟出实际激光光斑图像中“平顶”的效果。
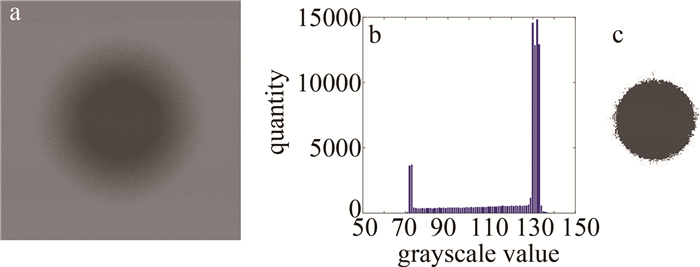
生成的模拟激光光斑灰度图如图 4a所示,图像的总大小为300 pixel×300 pixel,中心坐标为(150,150)。模拟激光光斑图像的灰度直方图如图 4b所示,图中第1个波峰对应的灰度值为74,自适应阈值分割后的图像如图 4c所示。

图 4 模拟激光光斑图像
Figure 4. Simulated laser spot pattern
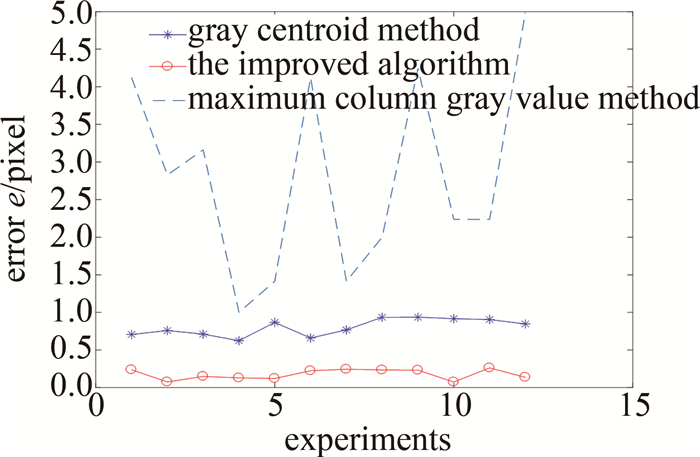
根据(8)式生成了12幅模拟激光光斑图像。分别使用灰度重心法、最大行列灰度值法以及本文作者提出的改进算法计算中心坐标,并以计算结果与中心坐标的距离作为误差:
$ e=\sqrt{\left(x_1-x_0\right)^2+\left(y_1-y_0\right)^2} $
(9) 式中,(x1,y1)为计算结果;e为计算误差,单位是pixel。
计算结果如图 5所示。可以看出,由于模拟激光光斑的灰度分布不符合高斯分布,因此最大行列灰度值法的计算误差最大,最高可达5 pixel,定位精度最差;又由于模拟激光光斑的灰度分布对称性较好,灰度重心法的误差大多都在1 pixel以内,定位精度较好;而本文中提出的改进算法误差都在0.4 pixel以内,定位精度进一步提高。

图 5 不同定位算法的计算误差
Figure 5. Calculation error of different positioning algorithms
-
在半导体激光加工过程中,激光的辐照时间和功率是影响光斑图像质量的重要因素,为了验证所提出算法的有效性,本文中通过单晶硅刻蚀实验,在不同辐照时间和激光功率条件下,分别对比研究了该算法与传统算法的定位精度。
-
在室内没有其它光线干扰的情况下,对激光光斑进行图像采集。保持相机与激光入射角度不变,且保证激光器输出功率稳定,并以此为前提,具体的实验步骤如下:(1)使用脉冲激光辐照单晶硅,产生激光光斑,并采集光斑图像;(2)移动平台,将上一步中产生的光斑移出相机视场以外,改变激光发射的时长,再次辐照单晶硅并采集图像;(3)重复步骤(1)和(2),采集了23幅激光光斑图像,辐照时间从1 ms~100 ms不等。
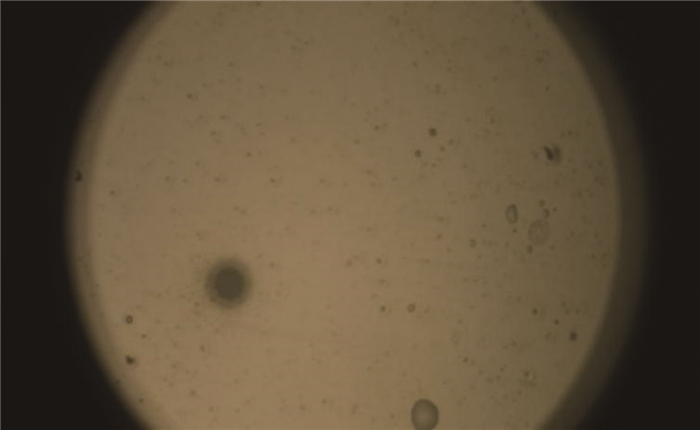
实验中使用的激光为脉冲宽度200 ps的超短脉冲激光,能量符合高斯分布,即激光束中心能量最高,光束外围能量按照2维高斯函数的关系逐渐衰减。使用CCD相机采集激光辐照单晶硅后产生的光斑图像,如图 6所示。照片的尺寸为3840 pixel×2168 pixel,每像素代表的实际距离为0.22 μm。由于光斑只占整幅图像的很小部分,为了减小计算量,以光斑所在区域为ROI(以下简称光斑图像),不同辐照时间下的光斑图像如图 7所示。

图 6 皮秒激光与硅作用光斑图
Figure 6. Spot image of picosecond laser interacting with silicon

图 7 不同辐照时间的光斑图像
Figure 7. Spot images of different irradiation time
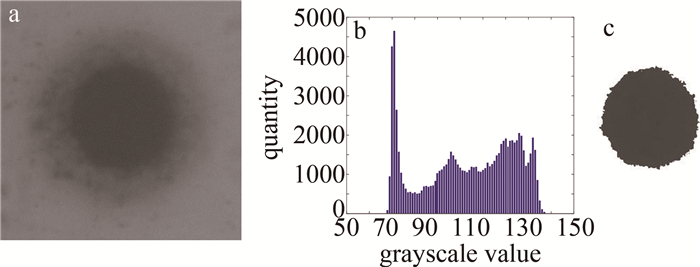
以辐照时间为1 ms的光斑为例,光斑图像的大小为350 pixel×350 pixel,原图为RGB格式的三通道图像,需要先将其变换为灰度图[18],如图 8a所示。图像的灰度直方图如图 8b所示。从直方图上得到对应阈值为73,自适应阈值分割后的图像如图 8c所示。

图 8 辐照时间为1 ms的实际光斑图像
Figure 8. Actual spot image with irradiation time of 1 ms
由于不知道激光真实中心的准确位置,只能进行估计,以光斑图像中C区域最小外接矩的对角线交点为估算中心,如图 9所示。

图 9 估算的激光光斑中心
Figure 9. The estimated laser spot center
分别使用灰度重心法、最大行列灰度值法以及本文提出的改进算法进行计算,并以计算结果与估算中心点的实际直线距离作为绝对误差:
$ \delta=K \sqrt{\left(x_1-x^{\prime}\right)^2+\left(y_1-y^{\prime}\right)^2} $
(10) 式中,δ是绝对误差,单位为μm;(x′,y′)为估算的中心点坐标;K=0.22 μm/pixel,为每像素代表的实际距离。
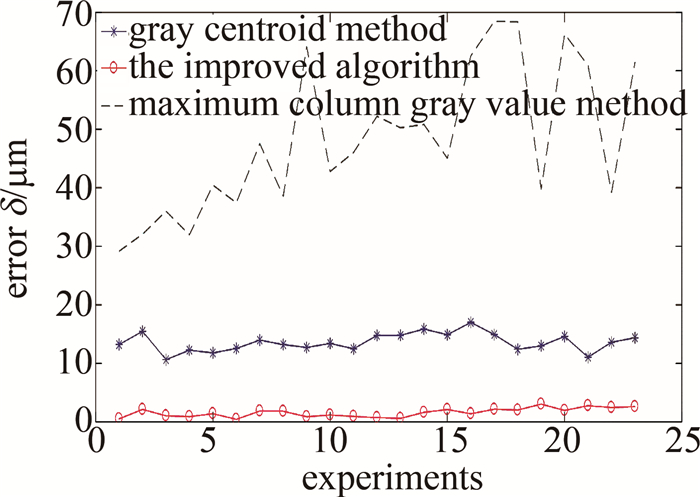
实验结果如图 10所示。

图 10 不同辐照时间下3种算法的绝对误差
Figure 10. Absolute error of the three algorithms under different irradiation time
采用标准差σ来计算定位精度:
$ \sigma = \sqrt {\frac{{\sum\limits_{i = 1}^n {{{\left( {{\delta _i} - \bar \delta } \right)}^2}} }}{n}} $
(11) 式中,δi为各次测量的绝对误差,δ为平均误差,n为实验组数。
由于实际实验中仍然存在一些不确定因素,激光光斑图像灰度不符合2维高斯分布,且对称性较差,因此灰度重心法和最大行列灰度值法的定位精度较低,其中灰度重心法的定位精度为1.564 μm,最大行列灰度值法的定位精度为12.552 μm,而本文作者提出的算法经过自适应阈值分割已经大大减少了噪声干扰,将目标图案缩小到光斑的中心区域,因此计算结果的精度有所提高,定位精度为0.761 μm。
-
在其它实验条件不变且保持激光辐照时间一定的情况下,每次改变激光功率,采集了20幅激光光斑图像,不同激光功率下的光斑图像如图 11所示。

图 11 不同激光功率的光斑图像
Figure 11. Spot images of different laser frequencies
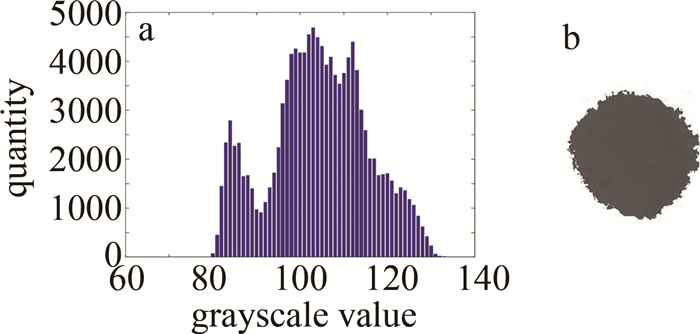
激光功率为0.95 W的光斑图像的灰度直方图及自适应阈值分割后的图像如图 12所示。

图 12 激光功率为0.95 W的实际光斑图像
Figure 12. Actual spot image with laser power of 0.95 W
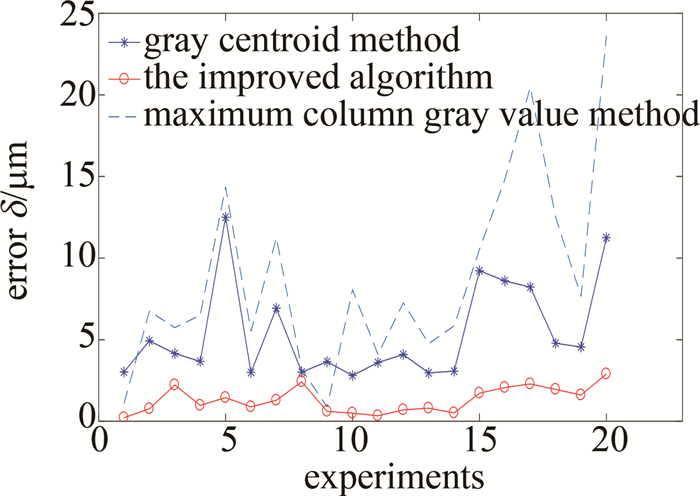
分别使用前面所述的3种算法对20幅光斑图像进行中心定位,实验结果如图 13所示。

图 13 不同激光功率下3种算法的绝对误差
Figure 13. Absolute errors of three algorithms under different laser power
由实验结果可以得出,灰度重心法的精度为2.983 μm,最大行列灰度值法的精度为5.986 μm,本文作者提出的改进算法精度为0.793 μm。结果表明,在不同激光功率条件下,本文中提出的算法对激光光斑中心的定位精度仍高于另外两种传统算法。
-
通过分析实际激光光斑图像灰度分布特点,将光斑图像划分为3个部分,仿真分析和实验研究了一种基于灰度直方图的激光光斑中心定位算法。研究结果表明,在不同辐照时间的条件下,该算法的定位精度较传统的灰度重心法提高了51.3%,比最大行列灰度值法提高了93.9%,而在不同激光功率的条件下,该算法的定位精度较灰度重心法和最大行列灰度值法分别提高了73.4%和86.8%。该算法简单实用,可为皮秒超短脉冲激光光斑中心定位控制系统的设计提供指导。
进一步的研究将集中于不同脉冲宽度的激光光斑中心定位,以确定算法的普适性。
基于灰度直方图的激光光斑中心定位算法
Laser spot center location algorithm based on gray histogram
-
摘要: 为了提高半导体激光加工中激光光斑中心定位精度, 根据皮秒超短脉冲激光辐照单晶硅后产生的光斑图像灰度分布特点, 提出了一种基于灰度直方图的激光光斑中心定位算法, 通过模拟激光光斑仿真分析和单晶硅刻蚀实验, 对比研究了不同辐照时间与不同激光功率条件下该算法与传统算法的定位精度。结果表明, 在辐照时间不同的条件下, 该算法定位精度达到0.761 μm, 比灰度重心法提高51.3%, 比最大行列灰度值法提高93.9%;在激光功率不同条件下, 该算法的定位精度达到0.793 μm, 比灰度重心法提高73.4%, 比最大行列灰度值法提高86.8%。此研究可为皮秒超短脉冲激光光斑中心定位控制系统的设计提供指导。Abstract: In order to improve the location of laser spot center accuracy in semiconductor laser processing, according to the gray distribution characteristics of spot image generated after picosecond ultra-short pulse laser irradiating monocrystalline silicon, an algorithm of laser spot center location based on gray histogram was proposed. Through simulation analysis of laser spot and monocrystalline silicon etching experiment, the positioning accuracy of the proposed algorithm was compared with that of the traditional algorithm under different irradiation time and laser power. Results show that under different irradiation times, the algorithm precision is 0.761 μm, 51.3% higher than that of gray centroid method and 93.9% higher than that of the maximum column gray value method. Under different laser power, the algorithm precision is 0.793 μm, 73.4% higher than that of gray centroid method and 86.8% higher than that of the maximum column gray value method. It can provide guidance for the design of the control system for spot center positioning of picosecond ultra-short pulse laser.
-
Key words:
- image processing /
- center positioning /
- gray histogram /
- laser spot /
- threshold segmentation
-
图 1 皮秒激光光斑的灰度分布图
a—光斑图像灰度平面分布图 b—光斑图像灰度3维分布图
Figure 1. Gray scale distribution of picosecond laser spot
a—spot image gray plane distribution b—spot image gray 3-D distribution
图 4 模拟激光光斑图像
a—模拟激光光斑原始图 b—模拟激光光斑图像灰度直方图 c—模拟光斑自适应阈值分割图
Figure 4. Simulated laser spot pattern
a—original image of simulated laser spot b—gray histogram of simulated laser spot image c—simulated light spot adaptive threshold segmentation graph
图 8 辐照时间为1 ms的实际光斑图像
a—光斑图像灰度图 b—光斑图像灰度直方图 c—光斑图像自适应阈值分割图
Figure 8. Actual spot image with irradiation time of 1 ms
a—gray scale of spot image b—gray histogram of spot image c—adaptive threshold segmentation of spot image
图 10 不同辐照时间下3种算法的绝对误差
Figure 10. Absolute error of the three algorithms under different irradiation time
图 12 激光功率为0.95 W的实际光斑图像
a—光斑图像灰度直方图 b—光斑图像自适应阈值分割图
Figure 12. Actual spot image with laser power of 0.95 W
a—gray histogram of spot image b—adaptive threshold segmentation of spot image
-
[1] 王春阳, 李金石. 激光光斑漂移的检测[J]. 应用光学, 2007(2): 205-208. doi: 10.3969/j.issn.1002-2082.2007.02.020 WANG Ch Y, LI J Sh. Detection of laser spot drift[J]. Journal of Applied Optics, 2007(2): 205-208(in Chinese). doi: 10.3969/j.issn.1002-2082.2007.02.020 [2] 黄凯, 代俊, 陈翔, 等. 适用于激光合成器的激光光斑中心检测[J]. 激光与红外, 2017, 47(12): 1499-1504. doi: 10.3969/j.issn.1001-5078.2017.12.008 HUANG K, DAI J, CHEN X, et al. Laser spot center detection for laser synthesizer[J]. Laser & Infrared, 2017, 47(12): 1499-1504(in Chinese). doi: 10.3969/j.issn.1001-5078.2017.12.008 [3] 刘好龙, 侯文, 范亚龙, 等. 一种改进的激光光斑中心定位算法[J]. 计算机测量与控制, 2014, 22(1): 139-141. doi: 10.3969/j.issn.1671-4598.2014.01.045 LIU H L, HOU W, FAN Y L, et al. An improved algorithm of laser spot center location[J]. Computer Measurement and Control, 2014, 22(1): 139-141 (in Chinese). doi: 10.3969/j.issn.1671-4598.2014.01.045 [4] LI Y H, ZHOU J B, HUANG F Sh, et al. Sub-pixel extraction of laser stripe center using an improved gray-gravity method[J]. Sensors, 2017, 17(4): 814. doi: 10.3390/s17040814 [5] 沈翀, 范晓进. 基于OpenCV激光中心定位的改进算法[J]. 测绘地理信息, 2021, 46(s1): 152-154. doi: 10.14188/j.2095-6045.2020071 SHEN Ch, FAN X J. An improved algorithm based on openCV laser center location[J]. Journal of Geomatics, 2021, 46(s1): 152-154(in Chinese). doi: 10.14188/j.2095-6045.2020071 [6] GAO R H, LIU H Sh, ZHAO Y, et al. High-precision laser spot center positioning method for weak light conditions[J]. Applied Optics, 2020, 59(6): 1763-1768. doi: 10.1364/AO.381626 [7] ZHU J, XU Zh J, FU D L, et al. Laser spot center detection and comparison test[J]. Photonic Sensors, 2019, 9(1): 49-52. doi: 10.1007/s13320-018-0432-x [8] ZHANG J. Research on the measurement accuracy of different laser spot center location[J]. Proceedings of the SPIE, 2019, 11052: 110520K. [9] 刘兆蓉, 王志乾, 刘绍锦, 等. 激光光斑中心精确定位算法研究[J]. 计算机仿真, 2011, 28(5): 399-401. doi: 10.3969/j.issn.1006-9348.2011.05.097 LIU Zh R, WANG Zh Q, LIU Sh J, et al. Research of precise laser spot center location algorithm[J]. Computer Integrated Manufacturing Systems, 2011, 28(5): 399-401(in Chinese). doi: 10.3969/j.issn.1006-9348.2011.05.097 [10] 张秋佳, 赵玉华. 基于加权插值算法的激光光斑中心检测[J]. 激光与红外, 2016, 46(1): 81-84. ZHANG Q J, ZHAO Y H. Measurement method of laser spot center based on weight interpolation algorithm[J]. Laser & Infrared, 2016, 46(1): 81-84(in Chinese). [11] 蒋佳雯, 康杰虎, 吴斌. 激光光斑中心高精度定位补偿算法研究[J]. 激光与光电子学进展, 2021, 58(14): 1412002. JIANG J W, KANG J H, WU B. Research on high precision location compensation algorithm of laser spot center[J]. Laser & Optoelectronics Progress, 2021, 58(14): 1412002(in Chinese). [12] FUJⅡ Y, MIYATAKE K, HARUNA M, et al. Centroid calculation algorithm using weight table to increase accuracy of center position detection[J]. Transactions of the Japan Society for Aeronautical and Space Sciences, Aerospace Technology Japan, 2012, 10(28): Pj_1-Pj_8. [13] TIMCHENKO L I, PIJARSKI P, ZAVADSKIY V, et al. Processing laser beam spot images using the parallel-hierarchical network for classification and forecasting their energy center coordinates[J]. Proceedings of the SPIE, 2016, 10031: 1003110. [14] 崔屹. 图像处理与分析——数学形态学方法及应用[M]. 北京: 科学出版社, 2000: 98-100. CUI Y. Image processing and analysis—Mathematical morphology method and its application[M]. Beijing: Science Press, 2000: 98-100(in Chinese). [15] 梁宇龙, 段发阶. 基于密度聚类的光条中心线提取方法[J]. 激光技术, 2020, 44(4): 459-465. LIANG Y L, DUAN F J. Study on image analysis of high power semiconductor line-laser[J]. Laser Technology, 2020, 44(4): 459-465(in Chinese). [16] 王杰飞, 刘洁瑜, 赵晗, 等. 一种改进的激光光斑中心亚像素定位方法[J]. 激光技术, 2015, 39(4): 476-479. WANG J F, LIU J Y, ZHAO H, et al. An improved sub-pixel positioning method of laser spot center[J]. Laser Technology, 2015, 39(4): 476-479(in Chinese). [17] 陈峥, 石勇鹏, 吉书鹏. 一种改进的Otsu图像阈值分割算法[J]. 激光与红外, 2012, 42(5): 584-588. CHEN Zh, SHI Y P, JI Sh P. Improved image threshold segmentation algorithm based on Otsu method[J]. Laser & Infrared, 2012, 42(5): 584-588(in Chinese). [18] 邬长安, 明生. 基于灰度直方图和投影技术的图像检索算法[J]. 光盘技术, 2007(5): 35-37. WU Ch A, MING Sh. Researching of image retrieval algorithm based on gray level histogram and projection technology[J]. CD Technology, 2007(5): 35-37(in Chinese). -

 点击查看大图
点击查看大图
计量
- 文章访问数: 2474
- HTML全文浏览量: 1603
- PDF下载量: 24
- 被引次数: 0
