 网站地图
网站地图





-
近年来,随着低轨通信卫星的繁荣发展,国内外涌现了诸如铱星、星链和中国卫星互联网系统等低轨通信星座[1],这些星座都配置有星间链路,以实现卫星间的信息高速交互,提高星座的系统容量。传统星间链路采用微波通信形式,随着星间传输速率的快速增长需求,传统微波通信的发展受到了自身传输容量等多方面因素的限制,而激光由于抗干扰能力强、安全性高、通信速率快、无需频率申请许可等诸多优势,是未来通信载体的新趋势[2-3]。通常激光通信载荷的发射和接收终端的望远镜口径较小,与微波终端系统常用的反射面天线相比,具有体积小、重量轻、功耗低等优点,更适合未来卫星的高集成度和小型化的发展需求[4],因此,激光通信成为目前低轨卫星星间通信的理想方案。然而,低轨卫星运动速度快,星座中两颗卫星之间的距离较远,并且火箭发射过程中的震动以及卫星入轨后的空间热力环境影响,都会使激光终端在轨指向过程中的状态参数偏离地面测试状态[5-6]。研究星间激光终端在轨快速建链的方法[7],将提高激光通信系统的易用性,进一步加快星间激光通信的大规模实际应用。
-
为提高低轨星座系统的通信路由效率和系统运行的稳健性,根据星座的空间构型特点,系统中的卫星需要与其前后左右共4个方向上的卫星之间建立永久的星间链路[8-9],如图 1所示。其中与前后两个方向卫星建立的星间链路属于同轨道面内星间链路,与左右两个方向卫星建立的星间链路属于异轨道面间的星间链路。星间激光载荷要支持同轨面的星间通信以及异轨道面的星间通信。

图 1 星座及星间链路示意图
Figure 1. Constellations and inter satellite links
根据星座运行过程中卫星之间的相对运动关系,同轨道面内卫星之间的相对位置关系保持稳定,异轨道面间卫星的相对位置关系则随着卫星运动而周期性变化[10]。同轨和异轨星间建链的激光终端有不同的指向范围要求。
由于卫星平台的能源有限,激光终端的设计应尽可能降低对卫星重量、体积、功耗、热耗的约束,因此,有必要对激光载荷进行结构集成化和功能一体化设计[11]。最后在配置载荷时,还需要综合考虑设备的可靠性和成本问题。
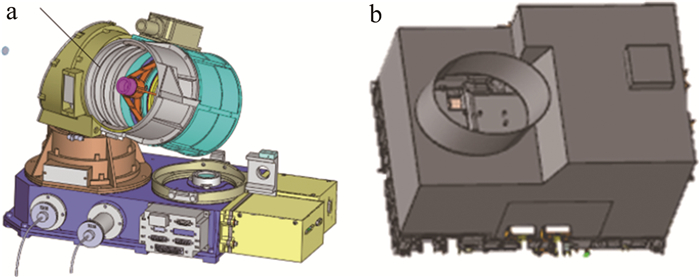
基于上述分析,本文作者提出了在卫星上配置固定式和转台式两种类型的激光终端,终端示意图如图 2所示。其中固定式激光终端仅依靠指向镜进行角度微调[12],可实现±2°范围内的光轴指向控制。转台式激光终端具有2维转台[13],可实现±80°范围内的光轴指向控制。
图 2 a—转台式激光终端示意图 b—固定式激光终端示意图
Figure 2. a—the rotatable laser payload b—the fixed laser payload
固定式激光终端将光学、机械、电子学全部集成为一个单机,界面简洁,光束指向镜置于内部,相较于转台式激光具有设计简单、可靠性高、重量轻、成本低等特点,特别适合用于在构型确定的星座中建立同轨星间激光链路;转台式激光由于其指向角度的灵活性,可以适应不同星间距离和不同指向关系下的星间激光建链需求,尤其适用于星间链路关系不断变化的异轨星间建链。同时转动范围较大的转台式激光可作为固定激光的备份使用,提高系统整体的可靠性。
-
在建链策略方面,本文中采用了恒星标校、信标光辅助建链和光轴一致性的设计思路,确保激光支持快速建链。如图 3所示,首先,通过恒星标校,修正载荷安装矩阵的参数,缩小卫星入轨后的指向不确定区域;其次,通过使用具有较大发散角的信标光,用以降低扫描捕获难度;最后,通过激光终端信号光的收发光轴一致性设计,实现信标捕获到信号捕获的快速过渡。

图 3 激光快速建链策略
Figure 3. Strategy of fast link establishment between laser terminals
该建链策略具有如下技术优势。
(a) 恒星标校。激光终端通过捕获指向恒星的过程,可以在轨标校光轴的指向偏差,最后通过修正终端的安装矩阵,减小指向误差; 相比于通过光学地面站标校,该标校方式不受天气和时间的限制,具有更高的标校效率[14]。
(b) 信标光辅助建链。由于低轨卫星的通信距离相对较近,相同的偏差量相比于高低轨卫星远距离通信具有更大的视角;信标光相比于信号光(30 μrad)有较大的发散角(400 μrad),使用信标光辅助建链可以有效缩短扫描时间,减小漏扫的概率[15];并且信标光具有功耗小(1 W)、重量轻(100 g)等特点,利用信标光辅助建链具有较高的性价比。
(c) 光轴一致性设计。信标光捕获建链后,需要调整信标光的粗跟踪点,再利用精跟踪完成信号光的捕获跟踪,最后根据信号光能量大小调整精跟踪点,实现光轴一致性调整,加快信标光捕获后的建链速度[16]。
为保证终端光轴的一致性问题,首先在激光终端设计时要保证一定的结构刚度和热稳定性,同时使用角反射器实现终端在轨后的光轴自检补偿工作,最后在粗跟踪捕获后根据通信探测器能量遥测,调整精跟踪点和提前量振镜的位置,使信号光能量最大。
光学系统框架采用高刚度、低膨胀系数的殷钢材料一体化加工而成,支持均匀化的主动温度控制,可以保证收发光轴的微弧度量级的稳定性。根据力、热环境实验数据分析,实验前后信号收发同轴度的最大变化量为12.2 μrad。
激光终端设计有角反射器,信号发射光与自检光采用并排光纤的发射方式,由同一焦面发射,开启自检光源时, 自检光束通过角反射器反射在跟踪相机成像。地面根据成像质心与标定质心的对比计算出射信号光的光轴偏离情况,计算偏差修正量并上注补偿。通过在轨调整,可确保收发同轴度偏差值小于3 μrad。
-
激光终端在轨恒星标校和光轴一致性校准过程中,需要将恒星标校探测器拍摄的恒星图或者自检光在跟踪相机上的成像结果快速回传至地面进行解算,为此联合星载综合处理机设计了激光标校信息量的快速获取功能。
载荷综合处理机实时大容量存储激光载荷的图像数据和高频信息参数,并通过馈电链路高速回传至地面,可以提高地面设计人员的分析效率和辅助策略的制定。
此外,为降低其他因素对激光建链的影响,将激光载荷与卫星平台进行解耦设计。通过特殊安装方式和减震措施控制激光和星敏间的变形量[17-18],同时通过仿真及专题实验的方式获得了微振动功率谱函数,并据此开展了地面测试,经测试激光和星敏间变形量不超过26.1″,测得的精跟踪精度不大于3.3 μrad,确保精跟踪满足要求。
-
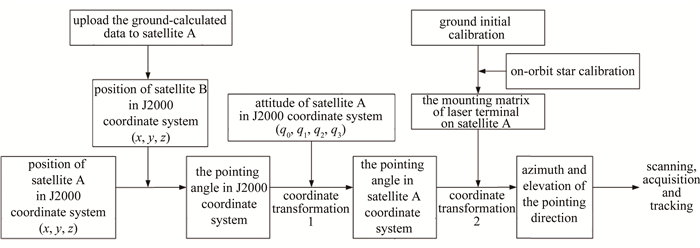
卫星平台的中心机按照通信协议向激光载荷发送规定格式的广播帧,内容主要包括本星在J2000坐标系下的姿态四元数(q0, q1, q2, q3)、同一时刻本星在J2000坐标系下的轨道位置和速度分量(x、y、z 3个方向),以及同一时刻相对应的目标星在J2000坐标系下的轨道位置和速度分量(x、y、z 3个方向)。激光载荷接收到平台广播帧后对上述数据进行解析,并依此计算对端载荷在本端载荷中的指向方位[19],如图 4所示。
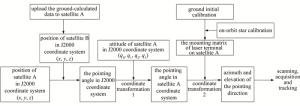
图 4 激光指向计算流程
Figure 4. Calculation process of laser terminal pointing at target
计算过程如下:(a)根据本星和目标星的轨道位置坐标计算J2000坐标系下的指向角;(b)结合卫星J2000坐标系下的姿态角,将过程(a)中得到的指向角转换为卫星本体坐标系下的指向角;(c)结合激光终端在卫星本体上的安装矩阵,将过程(b)中得到的指向角转换为激光终端指向的方位角、俯仰角数值;(d)激光终端驱动电机完成收发望远镜的预指向,随后开展扫描捕获跟踪工作。
在平台广播帧的组帧过程中用到的本星姿态及位置速度信息,可以直接通过本星的导航接收机和姿态敏感器获得,而目标星位置和速度信息可以通过地面运控中心上注上行链路得到,将目标星未来一段时间的轨道递推数据通过馈电链路上注给本星使用[20]。在恒星标校过程中,上述的目标星信息即为恒星在J2000坐标系下的位置坐标,并且该坐标不随时间变化。
-
转台式激光载荷和固定式激光载荷的配置原则已在轨应用于两颗宽带节点卫星,卫星部署在高度880 km、倾角86.5°的圆轨道上,两颗卫星位于前后相位差36°的同一轨道面内。各载荷的指向角度范围和安装方式如图 5所示。固定式激光终端服务于同轨道面内相邻两颗卫星之间的激光建链,当卫星入轨建立对地三轴稳定状态,并且前后两颗卫星的相位关系调整到位后,激光的指向角度随即确定,且仅与两颗卫星之间的地心角有关,数值为地心角大小的一半,而与卫星的轨道高度和轨道倾角均无关,卫星的轨道高度仅影响激光链路的通信距离。上述两颗卫星的地心角为36°,固定式激光终端的指向角度即为固定的18°,在卫星总装过程中将固定式激光终端倾斜安装在卫星舱板上,即可使激光收发望远镜相对于卫星有18°的倾斜角。

图 5 固定式激光终端指向角
Figure 5. The pointing angle of the fixed laser terminal
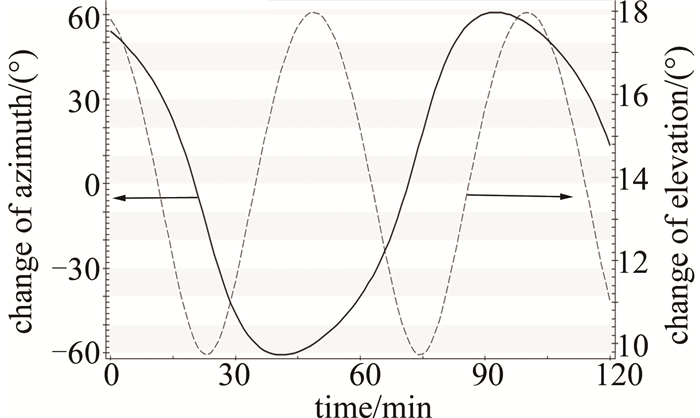
转台式激光终端服务于异轨道面内相邻两颗卫星之间的激光建链,在卫星本体坐标系下描述异轨相邻卫星运动过程中的角度变化,其结果如图 6所示。从图中可以看出, 激光指向的方位角变化范围为±60°,俯仰角的变化范围为9°~18°,由此可知转台式激光终端2维转台的转动范围,通过使载荷在卫星舱板上倾斜9°安装,可使转台在俯仰方向仅需0°~9°的转动范围。表 1中展示了两种激光终端的指向范围。
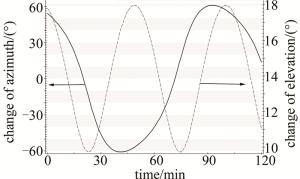
图 6 异轨星间链路指向角变化情况
Figure 6. Variation of pointing angle of inter satellite links
表 1 两种激光终端的指向范围
Table 1. Pointing range of two types of laser terminals
terminal type azimuth/(°) elevation/(°) service type fixed laser terminal 0 18 in the same orbital planes rotatable laser terminal -60~60 9~18 in the same orbital planes & across different orbital planes -
卫星入轨后,按着任务规划分别开展了激光终端的开机自检、恒星标校、信标光以及信号光捕获、光轴一致性调整等工作,利用转台式激光终端在低轨卫星上成功实现了星间激光链路的长时间稳定通信,前后共历时13 d,使用了41轨测控资源。
在恒星标校阶段,选取了编号为91262#和102098#的两颗恒星进行标校工作。结合激光终端在轨扫描捕获多颗恒星以及标校过程中的数据分析,激光终端在此次发射任务中经过发射阶段的冲击以及在轨阶段的温度变化后,初始不确定区域在20 mrad左右。地面分析计算并上注修正矩阵后,激光终端再次指向目标恒星的指向不确定区域已小于3 mard,在轨恒星标校后图像如图 7所示。
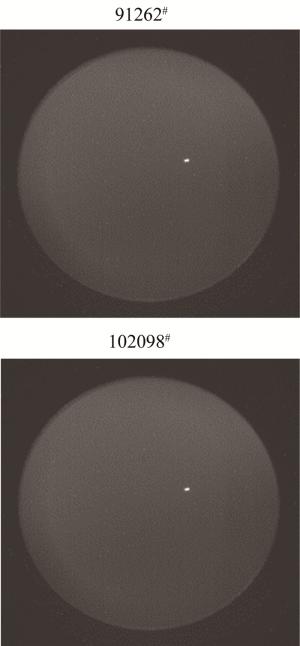
图 7 在轨恒星标校图像
Figure 7. On-orbit stellar calibration image
随后开展了30余次的双向信标光扫描捕获试验,100%成功,平均捕获时间22.6 s。之后通过调整粗跟踪点实现了信号光捕获跟踪,再通过调整精跟踪点和提前量振镜位置实现了光轴一致性调整, 并基于此实现了长时间的稳定跟踪,回放遥测中显示跟踪误差值如图 8所示。计算可得粗跟踪的精度为9.6 μrad,精跟踪的精度为2.3 μrad。图中x, y表示距离中心点位置的大小。

图 8 a—粗跟踪误差曲线 b—精跟踪误差曲线
Figure 8. a—coarse tracking error curve b—fine tracking error curve
-
在前述建立稳定跟踪激光链路中,设置终端进入通信自测模式,分别在1.25 Gbyte/s和2.5 Gbyte/s两个通信速率下开展通信测试,并保持链路稳定,最后通过下传遥测数据判读通信误比特率,最终实现了连续145 min的长时间无误码激光通信。
通信过程中的信噪比是通过误比特率来估计的。在激光终端研制阶段,通过误码测试仪监测不同输入光信号强度下的误比特率,获取误比特率与信噪比的对应关系。设备在轨后,根据自测模式下误比特率获取对应信噪比值,实现信噪比估计,进而转入业务通信。后续可通过带内光信噪比监测技术[21],在正常业务通信模式下实现高精度、高可靠的链路监测。
经在轨实验的验证,激光终端在采取该建链策略后,可以实现30 s内的在轨快速建链操作,且激光通信链路可以保证长时间的持续通信零误码,验证了激光建链策略的有效性,以及激光通信终端设计的指标符合性。
-
针对低轨通信卫星星座中的同轨星间链路和异轨星间链路建立开展了研究,提出了激光星间链路的配置方式,同轨道面内可配置固定式激光终端,异轨道面间可配置转台式激光终端,并给出了星间快速激光建链的方法,经在轨验证,采用恒星标校、信标光辅助建链和光轴一致性设计的策略,可实现在轨30 s内完成激光建链,该技术有助于推动星间激光快速建链的发展,促进低轨星间激光终端的优化设计和在低轨通信星座中的大规模应用。
低轨卫星激光载荷配置及快速建链方法的研究
Research on configuration of laser payload for LEO satellites and rapid link establishment method
-
摘要: 为了适应未来低轨卫星轻量化和低成本的发展趋势, 满足星间激光快速建链的使用需求, 对星间激光配置原则进行了分析, 采用转台式激光载荷和固定式激光载荷相结合的载荷配置方式, 分别用于异轨道面间和同轨道面内的星间建链, 设计了基于在轨恒星标校、信标光辅助建链和光轴一致性的激光载荷快速星间建链方案, 并介绍了全流程。结果表明, 星间激光载荷建链时间小于30 s, 可实现长时间的星间激光稳定跟踪通信。该研究结果有助于推动星间激光通信的发展和大规模在轨应用。Abstract: In order to adapt to the development trend of lightweight and low-cost low earth orbit (LEO) satellites and meet the demand for rapid laser inter-satellite link establishment, a payload configuration method combining a rotatable laser payload and a fixed laser payload was adopted based on the analysis of inter-satellite laser configuration principles, used for inter-plane link establishment and intra-plane link establishment respectively. A fast inter-satellite link establishment method and process for laser payloads based on in-orbit star calibration, beacon light-assisted link establishment, and optical axis consistency design were introduced. In-orbit experimental data show that the inter-satellite laser payload link establishment time can be less than 30 s, which can achieve stable and continuous inter-satellite laser communication. The study is helpful for promoting the development and large-scale in-orbit application of inter-satellite laser communication.
-
Key words:
- optical communication /
- rapid laser linking /
- laser in-orbit calibration /
- beacon light
-
图 2 a—转台式激光终端示意图 b—固定式激光终端示意图
Figure 2. a—the rotatable laser payload b—the fixed laser payload
图 8 a—粗跟踪误差曲线 b—精跟踪误差曲线
Figure 8. a—coarse tracking error curve b—fine tracking error curve
表 1 两种激光终端的指向范围
Table 1. Pointing range of two types of laser terminals
terminal type azimuth/(°) elevation/(°) service type fixed laser terminal 0 18 in the same orbital planes rotatable laser terminal -60~60 9~18 in the same orbital planes & across different orbital planes  下载: 导出CSV
下载: 导出CSV
-
[1] 何辞, 张亚生, 孙晨华, 等. 低轨星座组网及地面IP路由技术适应性分析[J]. 天地一体化信息网络, 2020, 1(1): 36-41. HE C, ZHANG Y Sh, SUN Ch H, et al. Analysis on low-earth-orbit constellation networking and adaptability of ground ip routing technology[J]. Space-Integrated-Ground Information Networks, 2020, 1(1): 36-41(in Chinese). [2] 王天枢, 林鹏, 董芳, 等. 空间激光通信技术发展现状及展望[J]. 中国工程科学, 2020, 22(3): 92-99. WANG T Sh, LIN P, DONG F, et al. Progress and prospect of space laser communication technology[J]. Strategic Study of Chinese Academy of Engineering, 2020, 22(3): 92-99(in Chinese). [3] 刘宏展, 刘立人. 星间激光通信发射终端耦合单元的研究[J]. 激光技术, 2007, 31(4): 416-418. doi: 10.3969/j.issn.1001-3806.2007.04.033 LIU H Zh, LIU L R. Research of the optical coupling unit for the transmitting terminal of intersatellite optical communication system[J]. Laser Technology, 2007, 31(4): 416-418(in Chinese). doi: 10.3969/j.issn.1001-3806.2007.04.033 [4] 高世杰, 吴佳彬, 刘永凯, 等. 微小卫星激光通信系统发展现状与趋势[J]. 中国光学, 2020, 13(6): 1171-1181. GAO Sh J, WU J B, LIU Y K, et al. Development status and trend of micro-satellite laser communication systems[J]. Chinese Optics, 2020, 13(6): 1171-1181(in Chinese). [5] 王小勇. 空间光学技术发展与展望[J]. 航天返回与遥感, 2018, 39(4): 79-86. WANG X Y. Development and prospect of space optical technology[J]. Spacecraft Recovery & Remote Sensing, 2018, 39(4): 79-86(in Chinese). [6] 刘政麟, 汪逸群. 星间激光通信机光轴指向误差源分析与补偿控制[J]. 宇航学报, 2023, 44(3): 454-464. LIU Zh L, WANG Y Q. Analysis and compensation of optical axis pointing error source of inter-satellite laser communicator[J]. Journal of Astronautics, 2023, 44(3): 454-464(in Chinese). [7] 林益明, 程竟爽, 何善宝, 等. 激光星间链路快速捕获技术综述[J]. 航天器工程, 2018, 27(1): 102-109. LIN Y M, CHENG J Sh, HE Sh B, et al. Review on fast acquisition techniques of laser inter-satellite links[J]. Spacecraft Engineering, 2018, 27(1): 102-109(in Chinese). [8] 杨盛庆, 吴敬玉, 朱文山, 等. 基于星间链路的星座相对构型保持方法[J]. 航空学报, 2023, 44(6): 242-253. YANG Sh Q, WU J Y, ZHU W Sh, et al. Control method of constellation relative-configuration maintenance based on inter-satellite links[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(6): 242-253(in Chinese). [9] 赵岳, 易先清, 侯振伟. 星间链路方案的设计与评价方法[J]. 装备学院学报, 2017, 28(1): 74-80. ZHAO Y, YI X Q, HOU Zh W. Design and evaluation method for inter-satellite link scheme[J]. Journal of Equipment Academy, 2017, 28(1): 74-80(in Chinese). [10] 赵尚弘, 吴继礼, 李勇军, 等. 卫星激光通信现状与发展趋势[J]. 激光与光电子学进展, 2011, 48(9): 092801. ZHAO Sh H, WU J L, LI Y J, et al. Present status and developing trends of satellite laser communication[J]. Laser & Optoelectronics Progress, 2011, 48(9): 092801(in Chinese). [11] 夏方园, 汪勃, 张国亭, 等. 激光星间链路终端技术发展与展望[J]. 光学技术, 2023, 49(2): 175-183. XIA F Y, WANG B, ZHANG G T, et al. Recent development and prospective of inter-satellite laser links terminal technology[J]. Optical Technique, 2023, 49(2): 175-183(in Chinese). [12] 陈祥, 呼新荣, 张建华, 等. 摆镜式激光通信终端光束指向与粗跟踪特性[J]. 红外与激光工程, 2021, 50(12): 20210146. CHEN X, HU X R, ZHANG J H, et al. Beam pointing and coarse tracking characteristics of tip-tilt mirror type laser communication terminal[J]. Infrared and Laser Engineering, 2021, 50(12): 20210146(in Chinese). [13] 张敏, 李勃, 滕云杰. 基于迭代学习控制的潜望式激光通信终端系统的动态跟踪设计[J]. 红外与激光工程, 2020, 49(10): 20200056. ZHANG M, LI B, TENG Y J. Design of dynamic tracking for periscopic laser communication terminal system based on iterative learning control[J]. Infrared and Laser Engineering, 2020, 49(10): 20200056(in Chinese). [14] 王阳, 黄煜, 李占峰, 等. 利用恒星对天文观测系统光轴平行性检校[J]. 红外与激光工程, 2017, 46(5): 124-129. WANG Y, HUANG Y, LI Zh F, et al. Calibration of optical axis parallelism by using star for astronomical observation system[J]. Infrared and Laser Engineering, 2017, 46(5): 124-129(in Chinese). [15] 左韬, 黄海波, 肖永军, 等. 空间光通信系统的初始捕获对准研究及实验[J]. 光通信研究, 2012 38(2): 67-70. ZUO T, HUANG H B, XIAO Y J, et al. Study on and experiment of initial acquisition and pointing for free space optical communication systems[J]. Study on Optical Communications, 2012, 38(2): 67-70(in Chinese). [16] 孙向阳, 张国玉, 段洁. 光机结构的轴向一致性可控方法研究[J]. 中国激光, 2012, 39(1): 0116001. SUN X Y, ZHANG G Y, DUAN J. Investigation of controllable axial conformity for opto-mechanical structure[J]. Chinese Journal of Lasers, 2012, 39(1): 0116001(in Chinese). [17] 王忠素, 吴清文, 郭权峰, 等. 空间光学载荷探测器组件抗冲击隔振设计[J]. 光学精密工程, 2017, 25(8): 2098-2105. WANG Zh S, WU Q W, GUO Q F, et al. Design of anti-shock vibration isolation for detector module of space optics load[J]. Optics and Precision Engineering, 2017, 25(8): 2098-2105(in Chinese). [18] 马晶, 韩琦琦, 于思源, 等. 卫星平台振动对星间激光链路的影响和解决方案[J]. 激光技术, 2005, 29(3): 228-232. MA J, HAN Q Q, YU S Y, et al. The effect of vibration on intersatellite optical communication and the resolving project[J]. Laser Technology, 2005, 29(3): 228-232(in Chinese). [19] 鲁绍文, 侯霞, 李国通, 等. 空间光通信技术发展现状及趋势[J]. 天地一体化信息网络, 2022, 3(2): 39-46. LU Sh W, HOU X, LI G T, et al. Development status and trend of space optical communication technology[J]. Space-Integrated-Ground Information Networks, 2022, 3(2): 39-46(in Chinese). [20] 温渊, 白沐炎, 易灵, 等. 低轨卫星高精度轨道递推算法研究[J]. 上海航天(中英文), 2019, 36(S2): 14-17. WEN Y, BAI M Y, YI L, et al. LEO high accuracy orbit extrapolation algorithm[J]. Aerospace Shanghai(Chinese & English), 2019, 36(S2): 14-17(in Chinese). [21] 鄢然, 胡春杰, 李蔚. 一种基于高斯过程回归的光信噪比监测技术[J]. 光电工程, 2021, 48(1): 200077. YAN R, HU Ch J, LI W. A novel optical signal-to-noise ratio monitoring technique based on Gaussian process regression[J]. Opto-Electronic Engineering, 2021, 48(1): 200077(in Chinese). -

 点击查看大图
点击查看大图

图(8) / 表(1)
计量
- 文章访问数: 486
- HTML全文浏览量: 328
- PDF下载量: 12
- 被引次数: 0
