 Map
Map




HTML
-
激光超声由于其非接触、灵敏度高、宽频带、空间分辨率高等优点,在材料的无损检测、在线监测等领域得到了越来越多的关注。激光辐照材料表面,可以同时产生纵波、横波和表面波等多种模式的超声波,其中表面波常被用来检测材料表面和近表面缺陷[1-7]。传统超声检测技术中,体波(横波和纵波)常被用来检测材料内部缺陷[8-10]。参考文献[8]中采用激光激发横波进行材料内部缺陷的检测,主要利用激光激发横波的入射波和试样底边的反射波分别经过缺陷时对应的时间差,进一步估算缺陷的位置,故只能相对定性检测缺陷位置。
由于横波在固体材料中的传播速度接近于表面波,且在材料边界处与表面波之间存在相关模式转换,故经常被用来解释表面波与表面缺陷的作用机理[11-14]。其中,COOPER等人在分析激光激发表面波与表面矩形缺陷作用的机理时[13-14],根据惠更斯原理将缺陷下奇异点作为次声源,该源产生的横波以30°倾斜角斜入射至材料侧面,并在侧面处转换为表面波。但关于横波在界面处发生模式转换的详细机理,尤其是模式转换对应临界角的相关具体研究和应用,目前仍需进一步推进。
本文中首先采用有限元方法,建立了在空间2维半无限平面中,激光水平面激发、接收点垂直侧面接收的数值模型,主要研究激光激发横波在垂直裂纹侧面所可能发生的模式转换,尤其是横波发生模式转换时对应临界角与垂直侧面接收点的位置关系。随后又针对数值模拟的过程和结果,采用实验室自主研发激光超声场检测仪,进行了对应的激光超声实验。实验中采取激光水平面辐照、表面波压电探头侧面接收,主要研究了不同激发位置(水平面)、接收位置(垂直面)下,接收信号的变化规律。数值模拟和实验结果均表明,激光辐照材料表面可以有效产生横波,且横波由激发点发散传播至试样侧面。对于特定的固体材料,存在一定的临界角,当侧面接收点位于该临界角对应深度以内时,接收点接收到激光激发表面波在拐角次生源处生成的表面波;但当侧面接收点位于该临界角以外时,接收点信号中增加了来自于横波模式转换而产生的新的表面波信号。根据模式转换信号“从无到有”这一规律,反向估算出固体材料的临界角,与理论计算结果接近,进一步验证了其模式转换机理。通过本文中的研究,进一步明确了横波在垂直裂纹侧面处发生模式转换的相关机理及其临界角的性质,这为激光超声检测垂直裂纹提供一种新途径。
-
根据超声波的传播机理[15],当一束超声波以一定的倾斜角到达两种材料的界面时,超声波会像光波一样发生反射和折射,因此遵循反射定律和折射定律。如图 1所示,假设介质1为固体材料,介质2为真空。由于超声波传播需要介质,因此当横波S由固体斜入射到达界面时,其在界面处只有反射而不会发生折射。对于同一种固体介质中,当入射横波到达界面发生反射产生横波和纵波L时,横波的入射角和反射角均为θ1, S,而由于固体介质中的纵波波速较横波大,根据Snell定律可知,其反射角θ1, L>θ1, S,其中下标1, S表示介质1中传播的横波S,下标1, L表示介质1中传播的纵波L。
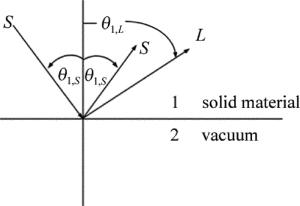
Figure 1. Analysis of reflection characteristics of shear wave at oblique incidence to vacuum interface in solid materials
此种情况下,设想横波的入射角θ1, S不断增大,则纵波的反射角θ1, L也随之不断增大。则入射横波必然存在某一临界角度θ,使纵波的反射角度θ1, L=90°,并产生界面波。而由于介质2为真空,实际上该界面波即为表面波,参考文献中也提到了横波以一定的角度到达材料表面,并且模式转换为表面波[11-12]。因此,可以根据该结论计算该临界角,具体为:
式中,v1, S, v1, L分别为介质1固体材料中传播的横波S和纵波L的波速。
-
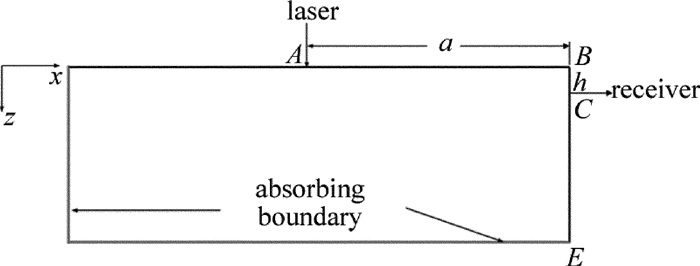
采用ABAQUS软件建立有限元模型[16-18]。假设在无限半空间内激光线源在y轴方向上均匀分布,并且激光线源趋于无限长。对于沿y方向均匀分布的激光线源,在光源长度范围内,样品承受的外力不随y轴变化,即沿y方向的应变和位移都是0,故可将该3维问题简化成2维平面应变问题来研究,建立如图 2所示的有限元模型。垂直裂纹侧面为BE面, A是激光源位置,到BE面的距离为a, C是接收信号的位置,到水平面拐点B的距离为h。本文中通过分析不同深度h接收到的表面波信号的变化,分析横波与垂直裂纹侧面作用后发生模式转换形成表面波的机理。
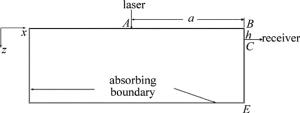
Figure 2. Finite element model of waves generated on the horizontal surface and received on the vertical side
所建模型为各向同性均匀的铝块,材料的热物理参量见表 1,计算过程中忽略温度变化对材料参量的影响。表 2中vL, vS, vR分别为纵波、横波及表面波在铝材料内的传播速率。模型的左侧和下侧均采用CINPE4平面无限单元消除来自边界的反射波干扰信号,右侧为固体和真空的自然交界,所采用的脉冲激光上升时间为10ns,即激光激发产生的表面中心频率大约为6.104MHz,计算出对应的中心波长约为500μm。激光源A至右侧水平距离设定为a=6mm。
Young modulus/GPa Poisson’sratio density/(kg·m-3) specific heat capacity/(J·kg-1·K-1) thermal conductivity/(W·m-1·K-1) thermal expansion coefficient/10-5K absorptivity 70 0.33 2700 900 160 2.3 0.05 Table 1. Material parameters of aluminum for finite element model
vS/(km·s-1) vL/(km·s-1) vR/(km·s-1) 3.080 6.260 2.910 Table 2. Velocity of waves in aluminum material
-
图 3为数值模拟结果。图 3a~图 3d分别表示h为0μm~400μm, 0μm~1200μm, 400μm~4000μm, 6000μm~6800μm的垂直位移波形图,图中P, R, S, RR, RS分别表示掠面纵波、直达表面波、直达横波、拐点B相当于次生源生成的表面波、横波模式转换生成的表面波。
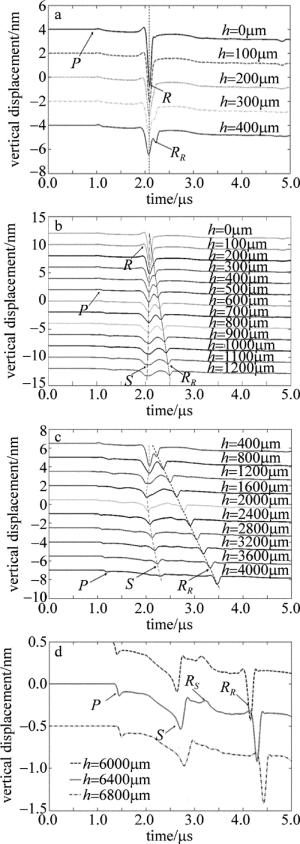
Figure 3. Displacement signals at different receiving positions
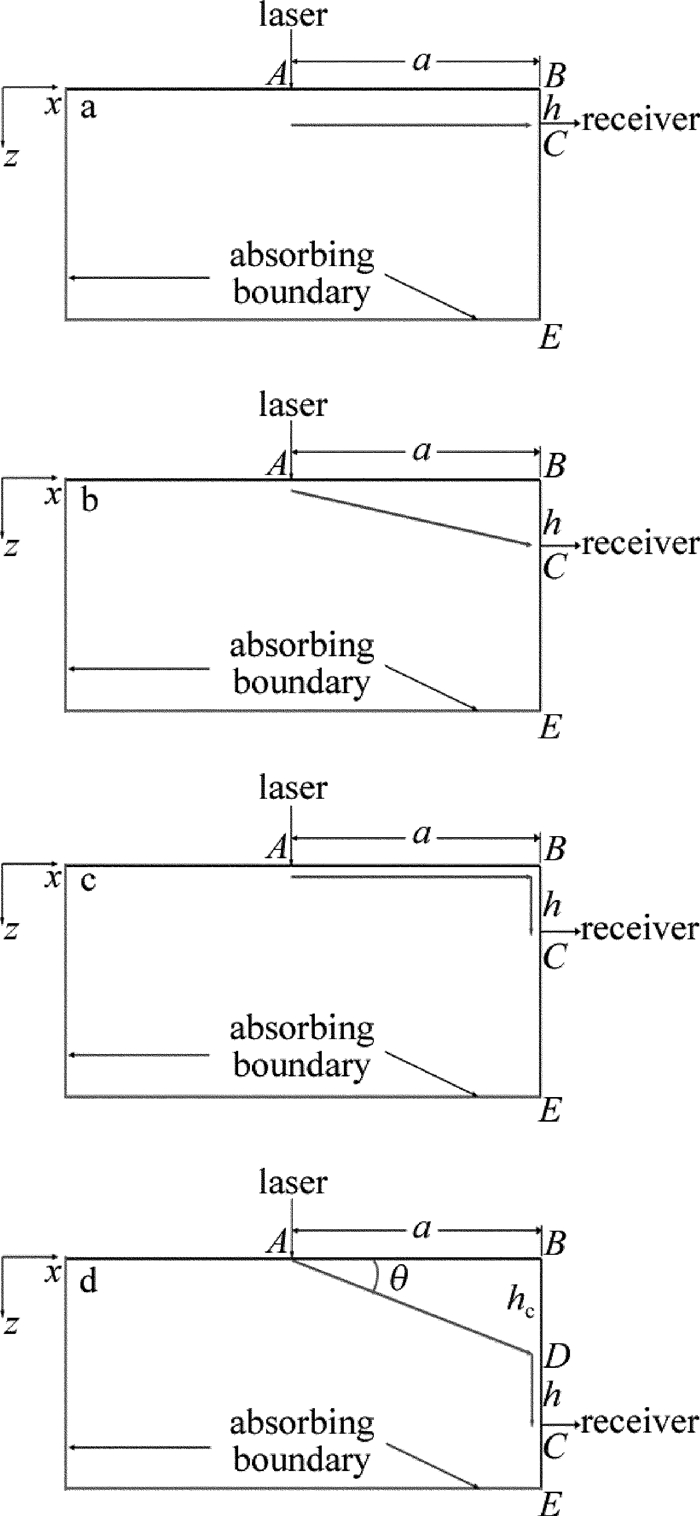
在图 3a中,h增至400μm,信号接收位置小于表面波渗透深度,即一个波长约500μm,所以接收的能量主要以激光激发的直达表面波R为主,对应的表面波传播路径如图 4a所示,且由直达表面波传播距离a与图 3a到达接收点C时间计算的表面波波速约2884.477m/s,可知该部分能量主要来源于激光激发的表面波R,这也符合参考文献[17]中的结论,即激光在材料水平面激发的表面波在其穿透深度内可以不经垂直裂纹壁端奇异点B而直接传播至接收侧面点C。而激光激发横波由于波速与表面波波速相近,但信号强度相对表面波十分微弱,所以在图中表现不明显,图中首先出现的信号P表示掠面纵波。当h增至400μm时,直达的表面波能量有明显衰减,且波形出现一定的分离。
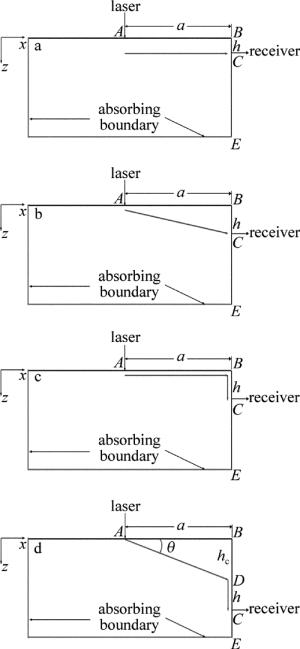
Figure 4. Propagation routes of different displacement signals
不断增大h,如图 3b和图 3c所示,发现原始的表面波信号充分分离成两部分。其中,波形图中第一信号(即前面的信号)的到达时间先保持不变后逐渐前移,当h>1600μm时,又呈现明显的非线性滞后。分析原因,当h < 500μm时,第一信号的到达时间仍基本保持不变,即对应图 3a中的信号R;但当h>500μm时,此时h大于表面波中心波长,激光激发的直达表面波信号变得十分微弱,激光激发的横波能量开始占主导作用,且由于铝材料中横波波速略大于表面波波速,第一信号的到达时间略微提前,对应横波的传播路径主要是由激发点斜入射直达接收点,传播路径如图 4b所示,但当h>1600μm时,第一信号呈现明显的非线性滞后,这说明此时横波波速vS的增长率已经不及横波传播距离(即图 4b中路径AC对应的距离)的增长率,传播时间随着传播距离AC的增大而增大。
而关于波形图中分离出的第二信号,分析原因,当接收位置在表面波中心波长内,激光激发的表面波R直达接收点C,且其信号较强,而经奇异点B转化生成的表面波RR相对较弱,表现不明显;当接收深度h逐渐变大,直达表面波R的能量逐渐衰减,经奇异点B转化生成的表面波RR相对增强,表现为图 3b中分离出的信号,且图中所示第二信号到达时间随h线性增加,具体的传播路径如图 4c所示。以接收信号深度在2000μm为例,信号S的到达时间约为2.047μs,对应图 3b中传播路径的距离为6324.555μm,则计算出对应的波速为3089.670m/s,即对应横波波速;信号RR的到达时间约为2.774μs,对应图 3c中传播路径的距离为8000μm,则计算出对应的波速为2883.922m/s,即对应表面波波速。
根据第1节中关于横波斜入射至界面处模式转换理论的介绍,当信号接收深度足够大时,将出现由横波转换形成的表面波信号,即满足图 1所示的转换规律,对应理论传播路径如图 4d所示,其中θ为实现模式转换的最小角度(临界角),对应横波发生模式转换的位置距水平面的距离BD为hc(即临界深度)。则当h<hc时,横波不发生模式转换,信号接收位置C只能接收激光激发的直达表面波R和由B点作为次生源产生的表面波RR;当h>hc时,接收信号增加了经激光激发横波在BC面发生模式转换形成的模式转换表面波RS。令临界角处横波模式转换的表面波信号(路径见图 4d)到达时间为t1,次生源生成的表面波信号(路径见图 4c)到达时间为t2,两个信号点到达时间差Δt12及t1, t2的表达式如下:
根据表 2中铝材料的速度参量值,并结合(1)式计算出,满足该模式转换的斜入射临界角约为30°,这也符合参考文献[13]和参考文献[14]中的结论。由(4)式计算,侧面能够接收到模式转换波的临界深度hc≈3464μm。图 3c中当h增至4000μm,此时接收深度已大于铝材料的临界深度3464μm,但并未发现新生成的表面波信号,分析原因可能是因为此时h比较接近临界深度,转换生成的表面波能量很小,不易直接看出。但当h分别增至6000μm, 6400μm和6800μm时,如图 3d所示,波形图中在S波与RR波之间出现了一个新的信号,图中标记为RS。以h=6000μm时接收到的信号为例,由(5)式计算出的理论时间差Δt12=1.00μs,由图 3d中模拟出的信号RS的到达时间t1≈3.140μs,信号RR的到达时间t2≈4.152μs,则两者时间差为1.01μs,与理论时间差十分接近,进一步证明该信号为横波模式转换生成的表面波信号。但图中该信号不太明显,可能是由于横波指向性,该方向上横波能量较弱,加之接收深度较大而能量衰减,故而转换生成的表面波能量也很弱。
2.1. 有限元模型的建立
2.2. 数值计算结果及分析

-
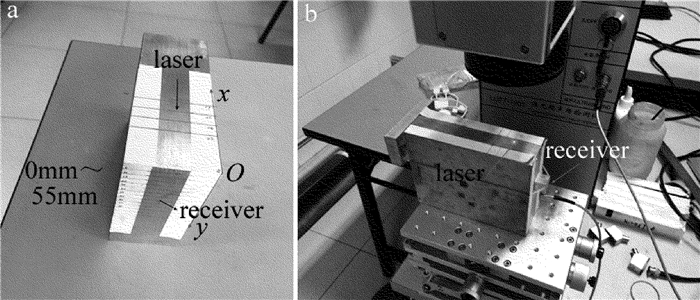
实验试样为150mm×50mm×120mm的铝制试样,如图 5a所示,图中已经标注了激发面(x)和接收面(y)。由于探头接触面为矩形,其实际接收位置距离图 5a中接收点即探头上边沿约为12.5mm,所以实际接收信号的位置为(y+12.5)mm。按照表 1中定义的铝材料理论波速参量值,计算出的理论临界角约为30°,由此计算出激发位置x在30mm, 40mm, 50mm, 60mm时理论临界深度对应的y值, 如表 3所示。探头上边沿与垂直侧面标记的一系列水平刻度对齐,具体标记如图 5a所示,即y从顶点0mm~55mm,每间隔5mm采集一次数据。实验信号采集过程如图 5b所示,本实验中采用实验室自主研发的激光超声场检测仪LUFT-1301[19]进行激光超声实验。选用2.5MHz表面波压电探头接收,由于该探头只能接收表面波信号而不能接收图 4b中对应的横波直达信号,因此排除了其它信号的干扰。

Figure 5. Experimental diagram of surface waves converted by shear waves
laser excitation x/mm critical angle θ/(°) critical depth xtanθ/mm probe position y/mm 30 30 17.3 4.8 40 23.1 10.6 50 28.9 16.4 60 34.6 22.1 Table 3. Position of laser excitation and signal reception
-
图 6为实验信号采集结果。图 6a、图 6b、图 6c和图 6d分别表示激光源在距右边界30mm, 40mm, 50mm, 60mm处激发、表面波压电探头在侧面(y轴, y=0mm~55mm)不同位置接收所得到的信号图。
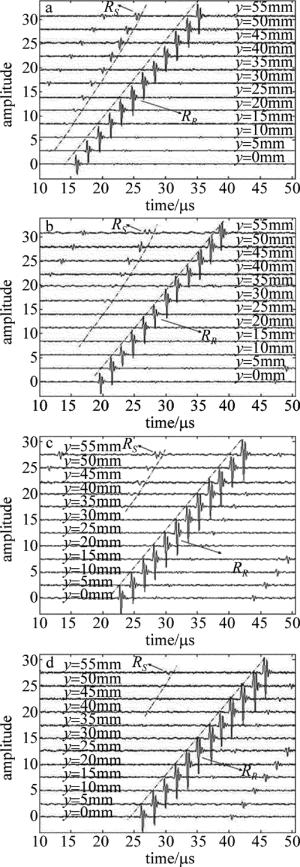
Figure 6. Side reception of surface wave piezoelectric probe corresponding to laser-excited ultrasonic at different positions
结合前面的数值模拟结果可知,当激光辐照材料表面所产生的表面波沿x负方向传播时,表面波到达试样边界处(即图中坐标轴交界处)会重新产生表面波并沿y轴正方向传播至探头,因此理论上采集波形图中至少存在一个超声信号RR,对应图 4c中的传播路径。从图 6a~图 6d的波形图中,均发现存在符合这一特征的表面波信号,图中标记为RR。
前面已经论证,当表面波压电探头位于临界深度之外(即横波入射角大于临界角)时,探头可接收到由于横波在垂直裂纹侧面发生模式转换生成的新的表面波信号。结合表 3中的计算结果,当激光源在x=30mm处激发,并且侧面接收探头起始位置位于y=5mm时,理论上应开始接收到横波转换的表面波。实验结果如图 6a所示,存在符合条件的表面波信号,对应数值模拟信号RS,并且进一步发现随着y的增大,信号RS的幅值越来越大。这是由于激光源产生的横波有效扫描区域是以类似“扇形”传播到右侧,如图 7所示。当探头接收点大于临界深度时,只要横波入射角不小于临界角,在两种材料界面处就可以生成转换表面波,转换率主要取决于扇形扫描有效面积。该面积的大小由Δh=h-hc决定,即h刚达到临界深度hc时,扇形扫描的有效面积较小,此时信号较弱;而继续增大h,扇形有效面积增大,可转换生成表面波信号的区域增大,接收信号强度增强,表现为图 6a中的信号RS幅值随y增大呈递增趋势。进一步分析,对于侧面C和E之间的任意一点D,其对应的斜入射角度记为β(β>θ),则易知横波沿路径ADE传播到达E点所需要的时间较ACE小,即表现为信号RS提前出现。并且随着探头位置不断下移,可发生模式转换的横波信号区域越来越大,信号RS的到达时间t1越来越小,则RR和RS信号点之间的时间差逐渐增大,符合图 6特征。此时运用(5)式计算两信号的时间差时,β对应式中的θ。
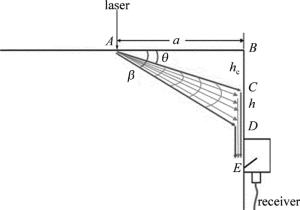
Figure 7. Side reception of surface wave piezoelectric probe corresponding to laser-induced transverse wave at critical angle
同理当激光源在x为40mm, 50mm, 60mm处激发时,理论上探头应分别在y为15mm, 20mm, 25mm处可以接收到转换表面波,并随着y的增大信号强度增强,图中所示也基本都符合该规律。值得注意的是,图 6c、图 6d表明,当激光在x为50mm, 60mm处激发时,分别在y为30mm, 40mm处才出现转换表面波信号RS,信号十分微弱,且探头接收位置y一定时,信号幅值相对x为30mm, 40mm时更小。分析原因,当x, y逐渐增大时,临界深度和横波传播路径也随之增大,则到达探头的能量逐渐衰减,加之图 6中信号的幅值被压缩,因此开始转换形成的表面波信号很微弱,在图中很难直观看出。但随着扇形扫过有效面积的增大,信号强度也随y的增大而增大,符合上文规律。同时,在图 6a~图 6d中,除了信号RS与RR,还出现了两个其它的信号。在信号RR后到达的信号是由于界面反射引起的,信号RS前面出现的信号可能是激光激发掠射纵波转换的表面波,本文中不做详细研究。
-
基于图 6a至图 6b的实验结果,利用(4)式,反向估算材料发生模式转换的临界角,计算结果如表 4所示。由表 4可知,总体上估算结果均接近理论值30°,进一步验证了前面的结论。而表中对于x为50mm和60mm时计算结果出现了一定的偏差,是因为此时能量衰减较快,临界深度的选取存在一定的误差;另外,本实验中采用的铝块所对应的实际的波速比vS/vL与理论值可能存在一定的偏差,进而造成实际的临界角与30°存在一定的差距。但实验结论与数值计算结果吻合较好,临界角和模式转换的机理均得到了很好的解释,该结论有助于更好地利用于超声检测领域。
laser excitation x/mm probe position for the first signal RS y/mm critical depth y/mm critical angle θ/(°) 30 5 17.5 30.2 40 15 27.5 34.5 50 30 42.5 40.4 60 40 52.5 41.2 Table 4. Experimental calculation of critical angle of aluminum materials
3.1. 实验器材的准备
3.2. 激光超声实验的结果及分析


3.3. 材料临界角的估算
-
首先建立了2维平面中激光辐照材料水平面、节点垂直侧面接收信号的数值模型,分析了激光源产生的超声波传播到达垂直裂纹侧面信号接收点的规律。结果表明,右侧接收点除了能够接收得到激光激发表面波直达信号及其在拐角次生源处重新生成的表面波信号,还能够接收横波直达信号以及经横波模式转换产生的表面波信号,并且该过程主要取决于接收点距离水平面的深度。随后基于数值计算模型和结论,进一步设计了激光水平面辐照、表面波压电探头侧面接收的激光超声实验进行对比验证。实验结果表明,存在一个临界角,当压电探头接收位置处于临界角对应深度以内时,压电探头能够接收到激光激发产生的表面波信号经拐角次生源新生成的表面波信号,并未接收到激光激发表面波直达信号,这是由于压电探头实际接收信号位置深度已经大于直达表面波传播深度;但当压电探头接收位置处于临界角对应深度以外时,接收信号中增加了一个信号,该信号主要源于激光激发横波斜入射至侧面时发生模式转换所产生的表面波,并且该信号由横波斜入射至侧面并发生模式转换时对应的临界角所确定,主要取决于材料中横波和纵波的速度比。该实验结果与数值模拟结果吻合较好,说明了实验结论正确。并且,随着压电接收位置逐渐下移,模式转换表面波的信号强度不断增大,且转换信号与激光激发表面波信号之间的时间差逐渐增大,这与激光激发横波的“扇形”散射扫描的面积和角度有关。通过针对激光激发横波与材料表面垂直裂纹侧面相作用发生模式转换现象的机理研究,进一步明确了模式转换现象和临界角的性质。同时,由于实验采用常规且廉价的压电探头,使用方法简单可靠,本文中的研究为实际应用激光激发、压电接收检测垂直裂纹提供一定的理论基础。
 DownLoad:
DownLoad: