 Map
Map



HTML
-
近些年, 单光子雷达技术逐渐发展成熟[1-3],作为一种新型激光3维雷达,光子计数激光雷达拥有自己显著的特点,如回波信号强度低、噪声大于激光回波、光电探测系统处于光子水平等[4]。不同于传统雷达探测回波时需要较多的光子形成弱光信号,单光子雷达使用单光子敏感探测器,仅需要检测到若干光子的返回信息便可得到目标位置信息,使得发射的光子更有效被利用,从而减少激光发射脉冲所需能量,因此单光子探测技术在采集数据方面具有较大优势,在当下以及未来,光子计数激光雷达在侦察、搜索等方面会发挥越来越重要的作用。
光子计数型激光雷达引入单光子探测器件和时间相关单光子计数(time-correlated single-photon counting,TCSPC)技术,使系统具有探测极微弱光信号的能力和皮秒量级的时间分辨率[5],即便在系统设计中采用超窄带滤波,但由于系统本身的灵敏度极高,探测目标背景仍会产生大量的噪声,因此,如何有效地去除噪声是发挥光子计数雷达探测能力的关键。目前常用的噪声去除和数据提取算法主要有残差比较算法、泊松滤波算法和距离相关检测算法等[6-8]。
HORAN等人[9]根据扫描数据中信号光子和噪声光子的分布特征,结合地形设定阈值,从而分离出目标点。HERZFELD等人[10]为模拟的ICESat-2数据分析而开发的计算算法,主要是借助特征向量计算出各项异性的密度中心,再根据地面和树冠设定密度阈值,达到识别地物的目的。LI等人[11]对初步去噪后的点云使用改进后的统计滤波方法,设定阈值进行去噪,但参量的设定比较依赖经验,对结果也有着较大的影响。LI等人[12]依靠计算点云密度进行去噪,首先进行图像分割进行粗去噪,再定义一种线性径向基函数进行精去噪,得到结果与设定的阈值比较,得出较好的结果。XU等人[13]在对单光子激光数据特点精确分析的基础上,提出一种基于地形相关和最小二乘曲线拟合的数据处理方法,获得较为精确的结果。上述算法要求的参量较多,且参量数值选取有较高的要求,作者在研究单光子数据空间分布特征的基础上,提出一种基于密度、参量自适应较强的去噪算法,并通过美国国家航空航天局(National Aeronautics and Space Administration,NASA)提供的多波束试验激光雷达(multiple altimeter beam experimental lidar, MABEL)实际飞行数据[14-15]进行验证,得到较好的结果。
-
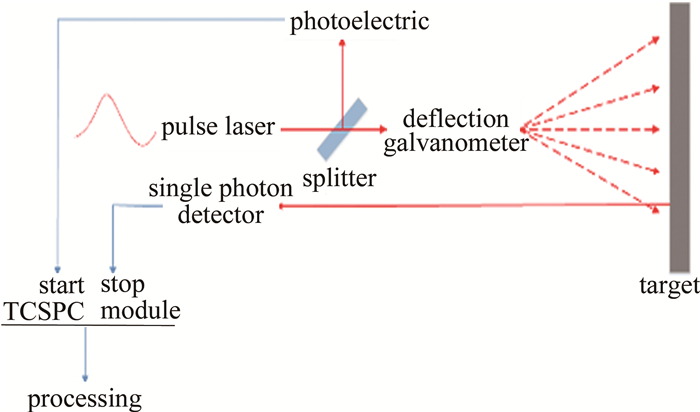
Figure 1. Photon counting lidar system
如图 1所示,光子计数激光雷达的工作原理是:脉冲激光器发射的脉冲经分光片后分成2束,一束充当计时脉冲照射到光电探测器,触发计时信号;其余部分照射到物体,经反射后产生回波被单光子探测器接收,并在计时电路中产生停止信号。TCSPC模块计算2次信号的时间差,得到本次脉冲的来回飞行时间。随着探测时间和探测次数的增加,得到扫描光子随时间分布的数据,传递给后续模块通过时间获取算法得到具体目标距离数据及成像。
由于系统本身的灵敏度很高,在探测过程中目标背景会产生大量的噪声,激光雷达的噪声大致分为3类:探测器噪声、放大器噪声、背景的辐射噪声[17]。随着制造工艺和致冷方式的进步,探测器噪声和放大器噪声得到有效抑制,为抑制背景噪声,除了在接收光学系统添加窄带滤波片外,还会采用距离门技术。
距离门技术是指给探测器添加一个时间区间,只有在这个时间区间内返回的回波光子才可以被探测到,在这个时间段外的回波光子不会被探测到。虽然如此,但大量的背景噪声仍会被引入到探测数据中,这就需要更近一步的去噪[18-19]。
-
常规的点云密度定义Di是指在规定的半径eps内包含点云的数目,如下式所示:
式中, pi是中心点坐标,pj是临近点坐标,i, j=1, 2, 3…; eps是指基于密度的空间聚类噪声应用(density-based spatial clustering of applications with noise,DBSCAN)算法中的半径参量。
与常规的点云密度定义相反,本文中规定点密度xi表示单个点云的密度,如(2)式所示。由k维树可以得到k个临近点到中心点的距离数组{x1, x2, …, xk},由于k值是输入参量,因此点密度xi表示包含k个点云的最小距离。
-
分割阈值xm根据点密度xi求出,其大小为整体点密度的均值,计算下式所:
由光子计数激光雷达的特性以及对实际数据集的研究可知,噪声点云的数量远远大于信号点云,因此分割阈值的范围在0.8xm~xm之间均可以满足实验要求,经多次实验可知,分割阈值的取值为0.9xm时结果最佳。
-
DBSCAN算法根据人为输入参量eps以及minpts(DBSCAN算法中的固定变量符号,表示eps距离内包含的个数) 衡量点云密度,遍历所有点云,将点云划分成一个个密度不等的簇。由于输入参量有较大的主观性,如果和数据集密度特征不匹配容易造成过分割或欠分割。
为了弥补原DBSCAN算法的缺点,本文中将点密度xi用于衡量单个点云密度,由于点密度xi和密度阈值xm均由数据集本身密度特征自动计算,因此在核心点“生长”为簇的过程中,避免了人工带来的误差。
改进后的聚类算法由于具有密度参量自适应的特性,可以对绝大多数的点云集进行合理分割。
-
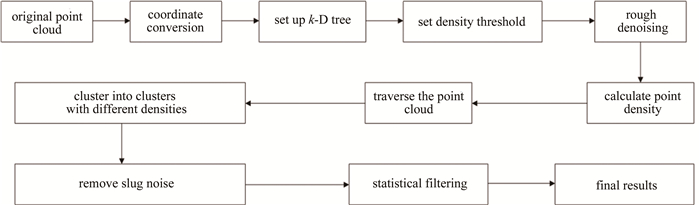
本文中去噪方法可以分为2步:粗去噪和精去噪。首先对数据进行粗去噪,去除大部分明显的噪声点,可以极大地简化后续算法的计算量;然后根据剩余点云的密度特征和空间分布特征,执行精去噪,获得目标点云数据。算法流程如图 2所示。

Figure 2. The flow chart of noise filter method
-
(1) 坐标转换。实际实验数据是大地坐标系(L, M, H),即由经度L、维度M和高程H组成,利用坐标转换[20-21],将大地坐标系数据转化成空间直角坐标系(x, y, z)数据;(2)建立空间拓扑关系。对直角坐标系下的点云数据通过k维树建立空间拓扑关系,由近邻索引计算点云之间密度;(3)设定阈值去除明显噪声。选取合适的阈值进行点云分割(本文中选取0.9倍密度均值作为阈值),滤除明显的离散噪声点。
-
(1) 计算剩余数据的点密度xi。对剩下的数据建立k维树,由最近邻索引得到距离数组{x1, x2, …, xk},求出点密度xi;(2)根据点密度进行点云分簇。随机选取一个点,当该点点密度满足阈值xm时进行区域增长,逐步遍历其周围的点,将满足条件的点归为一簇,重复此过程,直至所有点云均被处理;(3)去除团状噪声簇。数据分簇后,检查每个点云簇包含的点云数量,对于点云数小于一定值的点云簇视为噪声簇去除,具体分析如下:由于本文中选取的研究对象是山脉,在噪声影响的下,目标也可能被分成几段,所以经过试验选取阈值为0.5T,既可以达到去噪目的也尽可能保留信号点,其中,阈值T=数据集点云数÷聚类后簇数,查看每个簇点云数目,如果小于0.5T,则作为密集噪声簇去除; (4)去除目标很近的离散噪声。遍历点云得到临近的k个点, 并求出距离均值构成1维数组D,然后计算数组D的均值di和标准差σ,设定阈值滤除离散点。
定义di为点pi(xi, yi, zi)到其k个临近点pij(xij, yij, zij)的平均距离,di为di的均值,σ为di的标准差,j=1, 2, …, k。
2.1. 算法相关概念
2.1.1. 点密度xi
2.1.2. 密度阈值xm
2.1.3. 改进的DBSCAN算法
2.2. 算法详细步骤
2.2.1. 粗去噪
2.2.2. 精去噪
-
本文中的算法,需要设定的参量只有k,k表示选取临近点的数目,k值大小的意义在于点密度的衡量标准。k值很小, 话点密度由最近的较少点决定,增加了特殊值出现的情况,如某个信号点恰好周围最近的几个点较稀疏,或者某个噪声点最近的几个点距离很近等;k值很大, 会使信号点与噪声点的密度分割线较为模糊,虽然可以额外保留分布特殊的信号点,但也容易保留较多的噪声点。
本文中的数据来源是美国NASA提供的MABEL实际飞行数据,目标区域是位于美国加州Sierras-Forest地区,采用2010年12月飞行试验的532nm波段第50通道的观测数据进行实验。坐标转化后的数据总共有169511个点,其中噪声数据点有123280个,目标点云有46231个。
本文中选取不同k值代入算法进行运算,去噪后的点云数据如表 1所示。
k 8 12 16 25 38 50 70 100 noise point 7309 5592 5309 7205 8064 9411 9859 11044 signal point 40008 40575 40867 42741 42231 42674 42283 42822 Table 1. Point cloud data after denoising
此外还借助2个参考标准衡量k值对去噪结果的影响。一个是滤波精度N,其公式如下:
式中,Nc表示正确区分的信号点数目,Nt表示信号点总数。滤波精度N主要描述了点云正确识别率,但没有考虑噪声的影响。基于此,本文中还采用交并比U来描述信号点与噪声点的关系,公式如下:
式中, A表示实际信号点云数据集,B表示去噪后点云数据集,(A∩B)表示的是去噪后保留的点云数,(A∪B)表示的是实际信号点云数据和去噪后保留的噪声数据之和。一般来说,在计算机检测任务中,U>0.5的结果就是可以接受的,U越大,则点云图的质量也就越好。具体数据如表 2所示。
k 8 12 16 25 38 50 70 100 N/% 86.6 87.8 88.4 92.5 91.2 92.3 91.5 92.6 U/% 74.7 78.3 79.3 80.0 77.8 76.7 75.4 74.8 Table 2. The relationship between k value and N, U
从表 1可知,k值和去噪后的信号点和噪声点数目均呈正相关,这和上面对k值的分析相符。由表 2可知,随着k值的增长,N的增长率逐渐接近于0,而U却逐渐降低,表明噪声点的增长率大于信号点的增长率,继续增大k值得不偿失。总体上来看,U保持在75%~80%左右,表明k值的适当选取对点云图质量影响不是很大,符合本文中算法参量自适应的要求。
-
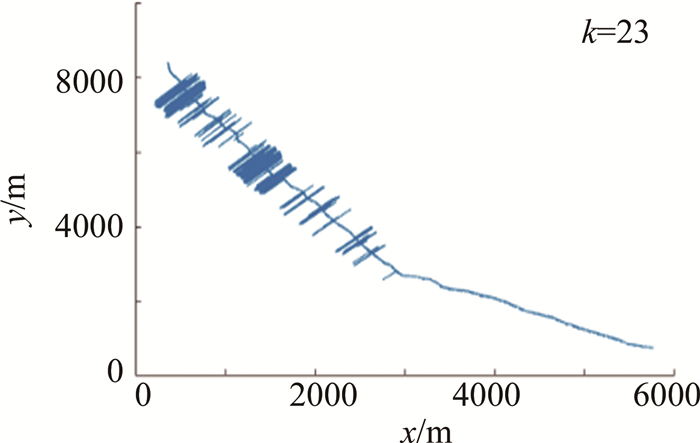
由第3节中分析可知,本文中的算法参量具有参量自适应强的特点,k值对最终结果的影响并不是很大,因此令k=23,首先将数据由大地坐标系转换到空间直角坐标系,并将坐标系原点平移到数据最小处,然后应用本文中的算法进行去噪。去噪后,剩余噪声点为6290个,保留的目标点为41733个,滤波精度N=90.27%,交并比U=79.5%。
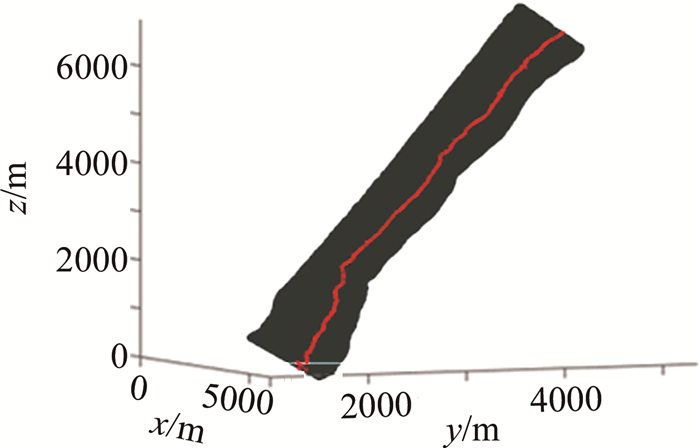
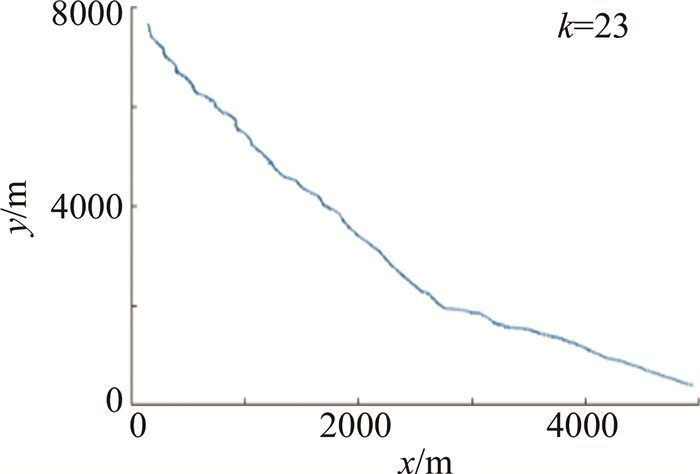
图 3是坐标转换且进行平移后的原始数据。其中黑色是噪声,细线是山脉。从图中可以看出, 噪声点的数量远大于信号点数量。图 4是粗去噪的结果。从图中可以看出,大量的噪声点已经被去掉,可以近似看出山脉的轮廓。图 5和图 6是精去噪的结果图。其中图 5是利用改进DBSCAN算法进行二次去噪后的结果,图中极大部分明显的团状噪声点已经被去除。图 6是应用统计滤波处理后的最终去噪结果,目标主体附近的离散噪声点云也有了明显的去除。图 7是部分放大后的场景图。从中可以看出,目标细节有了更多的保留,山坡上的树木也可以分辨。

Figure 3. 3-D scene graph
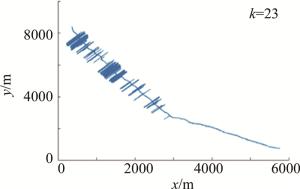
Figure 4. Rough denoising result graph
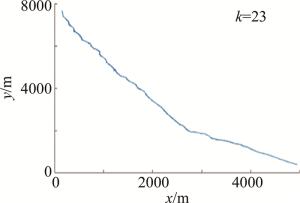
Figure 5. Second denoising result graph
Figure 6. Second denoising result graph
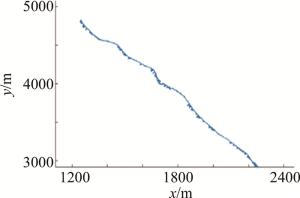
Figure 7. Partially enlarged view
-
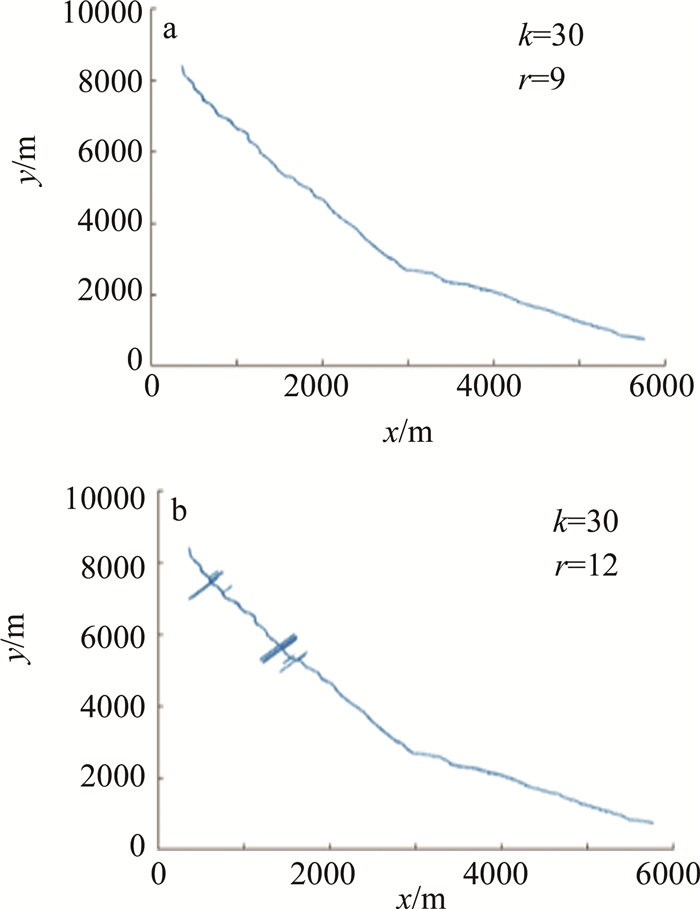
半径滤波算法也是常用的滤波算法,其原理是假定数据集中每一个点在给定的半径r内至少存在k个点,符合假定条件的作为信号点保存下来,不符合条件的作为噪声点除去,其中半径r以及数值k由人工指定。为了优化结果,事先选取数值k=30,半径r在密度阈值附近多个范围内取值,观察不同参量下的半径滤波结果,并与本文中去噪算法结果进行比较。
在k=30时,计算出的r=21。由于r值越大,保留的噪声点就越多,因此对于参量r主要选取小于21的值。令r为3, 6, 9, 12, 15, 18, 21和24,去噪后数据如表 3所示,去噪效果较好的结果如图 8所示。
r 3 6 9 12 15 18 21 24 signal point 9542 32291 40673 44049 45481 45990 46165 46198 noise point 29 1522 5652 10425 19011 31771 44969 58410 U/% 20.62 67.62 78.39 77.74 69.71 58.96 50.61 44.14 Table 3. Radius filtering data
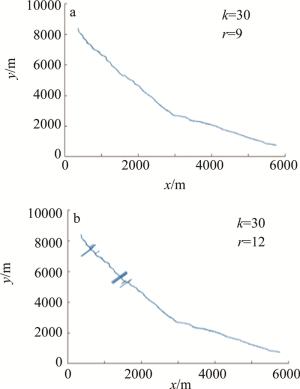
Figure 8. Filtering results under different r values
结合图 8和表 3可以发现,在不同的参量下,半径滤波的结果起伏非常大。半径滤波的准确性建立在较为苛刻的先验知识上,需要人为地设定参量,不具备普遍适用性,最好的参量情况下,其结果达到78.39%。
参考文献[12]中提出的去噪算法也采用滤波精度作为衡量算法的指标,该文献中滤波精度分别达到90.26%以及96.11%。本文中算法在输入参量k>20后,其滤波精度均达到90%左右,点云去噪结果较好,且可选参量范围较广,突出本文中算法参量自适应能力强的特点。
4.1. 实验结果


4.2. 算法对比
-
DBSCAN算法分割结果的好坏取决于参量设定,需要eps, minpts和数据集密度特征相匹配,因此,DBSCAN算法在处理不同数据集时需要多次实验来确定最佳参量,而本文中改进后的DBSCAN算法仅需要设定临近点数目,相应的距离参量可以由k维树根据数据集密度特征自动得出,因此改进的DBSCAN算法在适应性上大大提高。其次,本文中对改进后DBSCAN算法分割后的结果进行处理,去除了目标附近大部分团状噪声点云,再根据剩余点云特征,设定统计滤波法的阈值对点云进行最终处理,得到结果。
半径滤波算法是应用极为广泛的密度滤波算法,本文中利用半径滤波算法处理数据集,将得到结果与本文中算法相对比,可以看出, 本文中算法几乎不需要先验知识,在参量自适应性上远远优于半径滤波算法。此外, 本文中的去噪算法在参量适中的情况下, U普遍在75%~80%(半径滤波算法的U在20%~79%), 滤波精度在85%~93%,去噪结果也好于半径滤波算法。两种算法对比,更加突出本文中算法的优越性。
但本文中的算法也存在一定的缺点,对于距离目标较近且密度极大的团状点云无法有效的去除,只能尽量减少其大小与数量,此外,如果数据集很大的情况下,k维树的搜索速度也逐渐下降。由图 5粗去噪结果图可以清晰地看出扫描线结构,在粗去噪的基础上,结合扫描线间距以及同一扫描线上点间距进行精确去噪,这是作者下一步进行改进的方向。
 DownLoad:
DownLoad: